ADAM: Abduction to Demonstrate an Articulate Machine¶
Contents:
ADAM is a demonstration of “grounded language acquisition,” which is to say learning (some amount of) language from observing how language is used in concrete situations, like infants (presumably) do.
In the next section, we present an overview of the system architecture. That is followed by low-level API documentation. For installation instructions and information about contributing, please see the Markdown files in the project’s Git repository.
ADAM is ISI’s effort under DARPA’s Grounded Artificial Intelligence Language Acquisition (GAILA) program. Background for the GAILA program is given in DARPA’s call for proposals and here is a video of a talk giving an overview of our plans for ADAM (aimed at an audience familiar with the GAILA program).
Introduction¶
The goal of ADAM is to build a language learning module which can
learn (parts of) human language by observing a sequence of situations paired with situationally-appropriate language (usually a description of the situation).
be presented with novel situations and give reasonable linguistic descriptions of them.
For example, if the learner has been shown instances of various objects on a table and has also been shown instances of a toy truck, then when given the situation of a toy truck on a table, it should be able to describe it as truck on a table even if it has never seen that particular situation before.
A few aspects of ADAM’s approach worth noting are:
there are several ways one could represent a “situation.” Rather than using, for example, videos of real-life situations, we represent situations by a data structure in the computer’s memory.
it is implausible for the learner to observe the data structure representing the situation directly. Instead, the learner will observe a perceptual representation derived from the situation and based on those perceptual primitives that there is evidence an infant has access to.
in the GAILA program, researchers are permitted to control the type and sequence of example situations which are given to the learner (the curriculum). Rather than specifying a curriculum manually, we provide ways to procedurally generate curricula.
System Architecture¶
A particular “run” of the ADAM system is described by an Experiment.
Every Experiment needs to know
what
TopLevelLanguageLearnerto use,what
Situations to present to theTopLevelLanguageLearnerto teach it,what
Situations to present to theTopLevelLanguageLearnerto evaluate it,what sort of analyses to perform on the result.
There are a variety of ways to specify the situations for training and testing,
but this is prototypically done by generating them procedurally
using a SituationTemplateProcessor.
The way a Situation is presented to the TopLevelLanguageLearner is controlled
by a LanguageGenerator and a PerceptualRepresentationGenerator.
The analyses to perform on results are given by DescriptionObservers.
The ADAM system’s main entry point is adam.experiment.log_experiment.
For details on this see adam/experiment/README.md.
In addition, there may eventually be an interactive demonstration.
Fundamental Interfaces¶
adam.situation¶
Structures for describing situations in the world at an abstracted, human-friendly level.
- class adam.situation.Situation¶
A situation is a high-level representation of a configuration of objects, possibly including changes in the states of objects across time.
An example situation might represent a person holding a toy truck and then putting it on a table.
A curriculum is a sequence of
Situations.Situations are a high-level description intended to make it easy for human beings to specify curricula.
Situations will be transformed into pairs of
PerceptualRepresentations andLinguisticDescriptions for input to aTopLevelLanguageLearnerbyPerceptualRepresentationGenerators andLanguageGenerators, respectively.
- class adam.situation.BagOfFeaturesSituationRepresentation(features=i{})¶
Represents a
Situationas an unstructured set of features.For testing purposes only.
- class adam.situation.SituationObject(ontology_node, *, axes, schema_axis_to_object_axis, properties=i{}, debug_handle=NOTHING)¶
An object present in some situation.
Every object must refer to an
OntologyNodelinking it to a type in an ontology.Unlike most of our classes,
SituationObjecthas id-based hashing and equality. This is because two objects with identical properties are nonetheless distinct.SituationObjectshould not be directly instantiated. Instead useinstantiate_ontology_node.- ontology_node: adam.ontology.OntologyNode¶
The
OntologyNodespecifying the type of thing this object is.
- axes: adam.axes.Axes¶
- schema_axis_to_object_axis: Mapping[adam.axis.GeonAxis, adam.axis.GeonAxis]¶
Provides a mapping between the axes of an
ObjectStructuralSchema(which are abstract and generic - i.e. the axes of “tire”s in general) and the concrete instantiations of those axes which are stored in the axes field of this object. We need to track this information to keep the object axes in sync with theGeonaxes during perceptual generation.Note that this mapping may be empty if this situation object was not derived from an
ObjectStructuralSchema.Rather than setting this field by hand, we recommend using the static factory method
from_structural_schema.
- properties: immutablecollections._immutableset.ImmutableSet[adam.ontology.OntologyNode]¶
The
OntologyNodes representing the properties this object has.
- static instantiate_ontology_node(ontology_node, *, properties=i{}, debug_handle=None, ontology)¶
Make a
SituationObjectfrom the object type ontology_node with properties properties. The properties and ontology node must all come from ontology.- Return type
- class adam.situation.LocatedObjectSituation(objects_to_locations=i{})¶
A representation of a
Situationas a set of objects located at particularPoints.- objects_to_locations: Mapping[adam.situation.SituationObject, adam.math_3d.Point]¶
A mapping of
SituationObjects toPoints giving their locations.
- class adam.situation.Action(action_type, argument_roles_to_fillers=i{}, *, during=None, auxiliary_variable_bindings=i{})¶
An action.
This can be bound to
SituationObjectto represent actions inSituations or toTemplateObjectVariables to represent actions in situation templates.- action_type: _ActionTypeT¶
- argument_roles_to_fillers: immutablecollections._immutablemultidict.ImmutableSetMultiDict[adam.ontology.OntologyNode, Union[_ObjectT, adam.ontology.phase1_spatial_relations.Region[_ObjectT]]]¶
A mapping of semantic roles (given as
OntologyNodes) to their fillers.There may be multiple fillers for the same semantic role (e.g. conjoined arguments).
- during: Optional[adam.ontology.during.DuringAction[_ObjectT]]¶
- auxiliary_variable_bindings: immutablecollections._immutabledict.ImmutableDict[adam.ontology.action_description.ActionDescriptionVariable, _ObjectT]¶
A mapping of action variables from action_type’s
ActionDescriptionto the items which should fill them.
adam.language¶
Representations of the linguistic input and outputs of a TopLevelLanguageLearner.
- class adam.language.LinguisticDescription(*args, **kwds)¶
A linguistic description of a
Situation.This, together with a
PerceptualRepresentation, forms an observation that aTopLevelLanguageLearnerlearns from.A trained
TopLevelLanguageLearnercan then generate newLinguisticDescriptions given only aPerceptualRepresentationof aSituation.Any
LinguisticDescriptionmust minimally be able to be treated as a sequence of token strings.- span(start_index, *, end_index_exclusive)¶
- Return type
Span
- as_token_sequence()¶
Get this description as a tuple of token strings.
- Return type
- Returns
A tuple of token strings describing this
LinguisticDescription
- class adam.language.TokenSequenceLinguisticDescription(tokens)¶
A
LinguisticDescriptionwhich consists of a sequence of tokens.- as_token_sequence()¶
Get this description as a tuple of token strings.
- Return type
- Returns
A tuple of token strings describing this
LinguisticDescription
adam.perception¶
This module provides classes related to the perceptual primitive representation
used to describe Situations from the point-of-view of TopLevelLanguageLearners.
- class adam.perception.MatchMode(value)¶
An enumeration.
- OBJECT = 'object'¶
- NON_OBJECT = 'non_object'¶
- class adam.perception.ObjectPerception(debug_handle, geon=None, axes=NOTHING)¶
The learner’s perception of a particular object.
This object pretty much just represents the object’s existence; its attributes are handled via
PropertyPerceptions.- debug_handle: str¶
A human-readable string associated with this object.
It is for debugging use only and should not be accessed by any algorithms.
- geon: Optional[adam.geon.Geon]¶
- axes: adam.axes.Axes¶
- class adam.perception.PerceptualRepresentationFrame¶
Represents a
TopLevelLanguageLearner‘s perception of someSituationat a single moment.One or more of these forms a
PerceptualRepresentation.
- class adam.perception.PerceptualRepresentation(frames, *, during=None)¶
A
TopLevelLanguageLearner’s perception of aSituationas a sequence of perceptual representations of individual moments (frames).- frames: Tuple[PerceptionT, ...]¶
The frames making up the description of a situation.
Usually for a static situation, this will be a single frame, but there could be two or three for complex actions.
- during: Optional[adam.ontology.during.DuringAction[adam.perception.ObjectPerception]]¶
- static single_frame(perception_frame)¶
Convenience method for generating a
PerceptualRepresentationwhich is a single frame.- Parameters
perception_frame (~_PerceptionT2) – a
PerceptualRepresentationFrame- Return type
PerceptualRepresentation[~_PerceptionT2]- Returns
A
PerceptualRepresentationwrapping the provided frame.
- class adam.perception.PerceptualRepresentationGenerator(*args, **kwds)¶
A strategy for generating
PerceptualRepresentations ofSituations.This is used when constructing curricula procedurally so that humans do not need to build perceptual representations by hand.
- abstract generate_perception(situation, chooser)¶
Generate a
PerceptualRepresentationof aSituation.- Parameters
situation (~_SituationT) – The
Situationto represent.chooser (
SequenceChooser) – An optionalSequenceChooserto be used for any required random choices. If none is provided, an unspecified but deterministic source of “random” choice is used.
- Return type
PerceptualRepresentation[~PerceptionT]- Returns
A
PerceptualRepresentationof theSituation.
- class adam.perception.BagOfFeaturesPerceptualRepresentationFrame(features)¶
Represents a
TopLevelLanguageLearner’s perception of aSituationat a single moment as an unstructured set of features.For testing purposes only.
- class adam.perception.DummyVisualPerceptionFrame(object_perceptions=i{})¶
A visual representation made up of several objects represented by
DummyVisualPerceptionFrame.SingleObjectPerceptions.This is only for testing purposes.
- object_perceptions: immutablecollections._immutableset.ImmutableSet[adam.perception.DummyVisualPerceptionFrame.SingleObjectPerception]¶
A set of perceptions of objects as
DummyVisualPerceptionFrame.SingleObjectPerceptions.
- class SingleObjectPerception(tag, location)¶
A visual representation of a
Situationat a single moment as a string describing an object together with a location, with no other structure or properties.It simply says for e.g. a truck “this looks like a truck.” and here is its (
Point) location.This is only for testing purposes.
- location: adam.math_3d.Point¶
The
Pointwhere the object is located.
- class adam.perception.DummyVisualPerceptionGenerator(*args, **kwds)¶
Computes simple
PerceptualRepresentationfor aLocatedObjectSituationusing the name of the type of each object plus its location to generate aDummyVisualPerceptionFrame.- generate_perception(situation, chooser)¶
Generate a
PerceptualRepresentationof aSituation.- Parameters
situation (
LocatedObjectSituation) – TheSituationto represent.chooser (
SequenceChooser) – An optionalSequenceChooserto be used for any required random choices. If none is provided, an unspecified but deterministic source of “random” choice is used.
- Return type
- Returns
A
PerceptualRepresentationof theSituation.
adam.learner¶
Interfaces for language learning code.
- class adam.learner.LearningExample(perception, linguistic_description)¶
A
PerceptualRepresentationof a situation and itsLinguisticDescriptionthat aTopLevelLanguageLearnercan learn from.- perception: adam.perception.PerceptualRepresentation[PerceptionT]¶
The
TopLevelLanguageLearner’s perception of theSituation
- class adam.learner.TopLevelLanguageLearnerDescribeReturn(semantics_to_descriptions, *, description_to_confidence, semantics_to_feature_strs)¶
The descriptions are returned as a mapping from linguistic descriptions to their scores. The scores are not defined other than “higher is better.”
It is possible that the learner cannot produce a description, in which case an empty mapping is returned.
Features may not exist for all semantic nodes this is not guaranteed.
- semantics_to_descriptions: Mapping[adam.semantics.SemanticNode, adam.language.LinguisticDescription]¶
- description_to_confidence: Mapping[adam.language.LinguisticDescription, float]¶
- semantics_to_feature_strs: Mapping[adam.semantics.SemanticNode, Sequence[str]]¶
- class adam.learner.TopLevelLanguageLearner(*args, **kwds)¶
Models an infant learning language.
A
TopLevelLanguageLearnerlearns language by observing a sequence ofLearningExamples.A
TopLevelLanguageLearnercan describe new situations given aPerceptualRepresentation.- abstract observe(learning_example, offset=0, *, debug_perception_graph_logger=None)¶
Observe a
LearningExample, possibly updating internal state.- Return type
- abstract describe(perception, *, debug_perception_graph_logger=None)¶
Given a
PerceptualRepresentationof a situation, produce aTopLevelLanguageLearnerDescribeReturn.- Return type
- class adam.learner.MemorizingLanguageLearner¶
A trivial implementation of
TopLevelLanguageLearnerwhich just memorizes situations it has seen before and cannot produce descriptions of any other situations.If this learner observes the same
PerceptualRepresentationmultiple times, only the final description is memorized.This implementation is only useful for testing.
- observe(learning_example, offset=0, *, debug_perception_graph_logger=None)¶
Observe a
LearningExample, possibly updating internal state.- Return type
- describe(perception, *, debug_perception_graph_logger=None)¶
Given a
PerceptualRepresentationof a situation, produce aTopLevelLanguageLearnerDescribeReturn.- Return type
- adam.learner.get_largest_matching_pattern(pattern, graph, *, debug_callback=None, graph_logger=None, ontology, match_ratio=None, match_mode, trim_after_match=None, allowed_matches=i{})¶
Helper function to return the largest matching
PerceptionGraphPatternfor learner from a perception pattern and graph pair.- Return type
- adam.learner.graph_without_learner(perception_graph)¶
Helper function to return a
PerceptionGraphwithout a ground object and its related nodes.- Return type
- class adam.learner.ComposableLearner¶
- abstract learn_from(language_perception_semantic_alignment, offset=0)¶
Learn from a
LanguagePerceptionSemanticAlignmentdescribing a situation. This may update some internal state.- Return type
- abstract enrich_during_learning(language_perception_semantic_alignment)¶
Given a
LanguagePerceptionSemanticAlignmentwrapping a learning example, return such an updated alignment enriched with some extra semantic alignment information.The learner may have no information to add, in which case it can simply return the alignment it was passed.
- Return type
- abstract enrich_during_description(perception_semantic_alignment)¶
Given a
PerceptionSemanticAlignmentwrapping a perception to be described, return an updated alignment enriched with some extra semantic alignment information.The learner may have no information to add, in which case it can simply return the alignment it was passed.
- Return type
- abstract log_hypotheses(log_output_path)¶
Log some representation of the learner’s current hypothesized semantics for words/phrases to log_output_path.
- Return type
- abstract concepts_to_patterns()¶
Return a dictionary of learner’s current hypothesized semantics for words/phrases
- Return type
adam.semantics¶
Classes to represent semantics from the learner’s point-of-view.
Really this and HighLevelSemanticsSituation should somehow be refactored together,
but it’s not worth the trouble at this point.
- class adam.semantics.SyntaxSemanticsVariable(name)¶
A variable portion of a a
SurfaceTemplateor of a learner semantic structure.
- class adam.semantics.SemanticNode(*args, **kwds)¶
- concept: adam.semantics.Concept¶
- slot_fillings: immutablecollections._immutabledict.ImmutableDict[adam.semantics.SyntaxSemanticsVariable, adam.semantics.ObjectSemanticNode]¶
- static for_concepts_and_arguments(concept, slots_to_fillers, confidence)¶
- class adam.semantics.ObjectSemanticNode(concept, confidence)¶
- concept: adam.semantics.ObjectConcept¶
- slot_fillings: immutablecollections._immutabledict.ImmutableDict[adam.semantics.SyntaxSemanticsVariable, adam.semantics.ObjectSemanticNode]¶
- class adam.semantics.AttributeSemanticNode(concept, slot_fillings, confidence)¶
- concept: adam.semantics.AttributeConcept¶
- slot_fillings: immutablecollections._immutabledict.ImmutableDict[adam.semantics.SyntaxSemanticsVariable, adam.semantics.ObjectSemanticNode]¶
- class adam.semantics.RelationSemanticNode(concept, slot_fillings, confidence)¶
- concept: adam.semantics.RelationConcept¶
- slot_fillings: immutablecollections._immutabledict.ImmutableDict[adam.semantics.SyntaxSemanticsVariable, adam.semantics.ObjectSemanticNode]¶
- class adam.semantics.ActionSemanticNode(concept, slot_fillings, confidence)¶
- concept: adam.semantics.ActionConcept¶
- slot_fillings: immutablecollections._immutabledict.ImmutableDict[adam.semantics.SyntaxSemanticsVariable, adam.semantics.ObjectSemanticNode]¶
- class adam.semantics.LearnerSemantics(objects, attributes, relations, actions, functional_concept_to_object_concept=i{})¶
Represent’s the learner’s semantic (rather than perceptual) understanding of a situation. The learner is assumed to view the situation as a collection of objects which possess attributes, have relations to one another, and serve as the arguments of actions.
- objects: immutablecollections._immutableset.ImmutableSet[adam.semantics.ObjectSemanticNode]¶
- attributes: immutablecollections._immutableset.ImmutableSet[adam.semantics.AttributeSemanticNode]¶
- relations: immutablecollections._immutableset.ImmutableSet[adam.semantics.RelationSemanticNode]¶
- actions: immutablecollections._immutableset.ImmutableSet[adam.semantics.ActionSemanticNode]¶
- functional_concept_to_object_concept: immutablecollections._immutabledict.ImmutableDict[adam.semantics.FunctionalObjectConcept, adam.semantics.ObjectConcept]¶
- objects_to_attributes: immutablecollections._immutablemultidict.ImmutableSetMultiDict[adam.semantics.ObjectSemanticNode, adam.semantics.AttributeSemanticNode]¶
- objects_to_relation_in_slot1: immutablecollections._immutablemultidict.ImmutableSetMultiDict[adam.semantics.ObjectSemanticNode, adam.semantics.RelationSemanticNode]¶
- objects_to_actions: immutablecollections._immutablemultidict.ImmutableSetMultiDict[adam.semantics.ObjectSemanticNode, adam.semantics.ActionSemanticNode]¶
- static from_nodes(semantic_nodes, *, concept_map=i{})¶
- Return type
adam.situation.templates¶
Tools for working with situation templates, which allow a human to compactly describe a large number of possible situations.
Note that we provide convenience functions like random_situation_templates and
one_situation_per_template to assist in supplying Situations to Experiments.
- class adam.situation.templates.SituationTemplate¶
A compact description for a large number of
Situations.
- class adam.situation.templates.SituationTemplateProcessor(*args, **kwds)¶
Turns a
SituationTemplateinto one or moreSituations.- abstract generate_situations(template, *, num_instantiations=1, chooser=Factory(factory=<function RandomChooser.for_seed>, takes_self=False), include_ground=True, default_addressee_node=None)¶
Generates one or more
Situations from aSituationTemplate.The behavior of this method should be deterministic conditional upon an identically initialized and deterministic
SequenceChooserbeing supplied.- Parameters
template (~_SituationTemplateT) – the template to instantiate.
default_addressee_node (
Optional[OntologyNode]) – The ontology node to use as the default addressee in the scene.num_instantiations (
int) – the number of instantiations requested.chooser (
SequenceChooser) – the means of making any random selections the generator may need.include_ground (
bool) – If true, include the ground in the scene.
- Return type
Iterable[~SituationT]- Returns
A set of instantiated
Situations with size at most num_instantiations.
- class adam.situation.templates.SituationTemplateObject(handle)¶
An object in a
SituationTemplate.For example, a particular ball or person.
- class adam.situation.templates.SimpleSituationTemplate(objects, objects_to_required_properties, objects_to_ontology_types)¶
A minimal implementation of a situation template for objects only (no actions or relations).
It is usually easiest to create a
SimpleSituationTemplateusingSimpleSituationTemplate.Builder.- objects: immutablecollections._immutableset.ImmutableSet[adam.situation.templates.SituationTemplateObject]¶
The
SituationObjects present in theSituation, e.g. {a person, a ball, a table}
- objects_to_required_properties: immutablecollections._immutablemultidict.ImmutableSetMultiDict[adam.situation.templates.SituationTemplateObject, adam.ontology.OntologyNode]¶
A mapping of each
SituationObjectin theSituationtoOntologyNodes it is required to have.
- objects_to_ontology_types: immutablecollections._immutabledict.ImmutableDict[adam.situation.templates.SituationTemplateObject, adam.ontology.OntologyNode]¶
A mapping of each
SituationObjectin theSituationto theOntologyNodes its type must correspond to either directly or by inheritance.
- class Builder¶
The preferred means of creating a
SimpleSituationTemplate- object_variable(handle, ontology_type, properties=())¶
Add an object to a
SimpleSituationTemplatebeing built.- Parameters
handle (
str) – the debugging handle of the objectontology_type (
OntologyNode) – theOntologyNodewhich any object filling this slot must match.properties (
Sequence[OntologyNode]) – theOntologyNodes any object filling this slot must have.
- Return type
- Returns
the
SituationTemplateObjectwhich was created.
- build()¶
- Return type
- class adam.situation.templates.SimpleSituationTemplateProcessor(ontology)¶
A trivial situation template processor for testing use.
This cannot handle anything in situation templates except object variables. This object variables are instantiated with random compatible objects from the provided
Ontology; they are positioned in a line one meter apart.- generate_situations(template, *, num_instantiations=1, chooser=Factory(factory=<function RandomChooser.for_seed>, takes_self=False), include_ground=True, default_addressee_node=None)¶
Generates one or more
Situations from aSituationTemplate.The behavior of this method should be deterministic conditional upon an identically initialized and deterministic
SequenceChooserbeing supplied.- Parameters
template (
SimpleSituationTemplate) – the template to instantiate.default_addressee_node (
Optional[OntologyNode]) – The ontology node to use as the default addressee in the scene.num_instantiations (
int) – the number of instantiations requested.chooser (
SequenceChooser) – the means of making any random selections the generator may need.include_ground (
bool) – If true, include the ground in the scene.
- Return type
ImmutableSet[LocatedObjectSituation]- Returns
A set of instantiated
Situations with size at most num_instantiations.
- adam.situation.templates.random_situation_templates(situation_templates, num_random_templates, sequence_chooser)¶
Get num_random_templates random (with replacement)
SituationTemplates from situation_templates, where “random” choices are given by the providedSequenceChooser.- Return type
adam.situation.templates.phase1_templates¶
Our strategy for SituationTemplates in Phase 1 of ADAM.
- class adam.situation.templates.phase1_templates.TemplateObjectVariable(handle, node_selector, asserted_properties=i{})¶
A variable in a
Phase1SituationTemplatewhich could be filled by any object whoseOntologyNodeis selected by node_selector.asserted_properties allows you to specify what properties should be asserted for this object in generated
Situations. This is for specifying properties which are not intrinsic to an object (e.g. if your object variable is constrained to be a sub-type of person you don’t need to and shouldn’t specify ANIMATE as an asserted property) and are not used to filter what object can fill this variable. For example, if you wanted to specify that whatever fills this variable, you want to make it red in this situation, you would specify RED in asserted_properties.We provide
object_variableto make creatingTemplateObjectVariables more convenient.TemplateObjectVariables with the same node selector are not equal to one another so that you can have multiple objects in aSituationwhich obey the same constraints.- node_selector: adam.ontology.selectors.OntologyNodeSelector¶
- asserted_properties: immutablecollections._immutableset.ImmutableSet[Union[adam.ontology.OntologyNode, adam.situation.templates.phase1_templates.TemplatePropertyVariable]]¶
- class adam.situation.templates.phase1_templates.TemplatePropertyVariable(handle, node_selector)¶
A variable in a
Phase1SituationTemplatewhich could be filled by any property whoseOntologyNodeis selected by node_selector.We provide
property_variableto make creatingTemplatePropertyVariables more convenient.TemplatePropertyVariables with the same node selector are not equal to one another so that you can have multiple objects in aSituationwhich obey the same constraints.- node_selector: adam.ontology.selectors.OntologyNodeSelector¶
- class adam.situation.templates.phase1_templates.TemplateActionTypeVariable(handle, node_selector)¶
A variable in a
Phase1SituationTemplatewhich could be filled by any action type whoseOntologyNodeis selected by node_selector.We provide
action_variableto make creatingTemplateActionTypeVariables more convenient.- node_selector: adam.ontology.selectors.OntologyNodeSelector¶
- class adam.situation.templates.phase1_templates.Phase1SituationTemplate(name, salient_object_variables, *, background_object_variables=i{}, asserted_always_relations=i{}, constraining_relations=i{}, actions=i{}, syntax_hints=i{}, gazed_objects=NOTHING, before_action_relations=i{}, after_action_relations=i{})¶
The
SituationTemplateimplementation used in Phase 1 of the ADAM project.Currently, this can only be a collection of
TemplateObjectVariables.Phase1SituationTemplateGenerator will translate these to a sequence
HighLevelSemanticsSituations corresponding to the Cartesian product of the possible values of the object_variables.Beware that this can be very large if the number of object variables or the number of possible values of the variables is even moderately large.
- salient_object_variables: immutablecollections._immutableset.ImmutableSet[adam.situation.templates.phase1_templates.TemplateObjectVariable]¶
- background_object_variables: immutablecollections._immutableset.ImmutableSet[adam.situation.templates.phase1_templates.TemplateObjectVariable]¶
- asserted_always_relations: immutablecollections._immutableset.ImmutableSet[adam.relation.Relation[adam.situation.templates.phase1_templates.TemplateObjectVariable]]¶
This are relations we assert to hold true in the situation. This should be used to specify additional relations which cannot be deduced from the types of the objects alone.
- constraining_relations: immutablecollections._immutableset.ImmutableSet[adam.relation.Relation[adam.situation.templates.phase1_templates.TemplateObjectVariable]]¶
These are relations which we required to be true and are used in selecting assignments to object variables. Our ability to enforce these constraints efficiently is very limited, so don’t make them too complex or constraining!
- actions: immutablecollections._immutableset.ImmutableSet[adam.situation.Action[Union[adam.ontology.OntologyNode, adam.situation.templates.phase1_templates.TemplateActionTypeVariable], adam.situation.templates.phase1_templates.TemplateObjectVariable]]¶
- syntax_hints: immutablecollections._immutableset.ImmutableSet[str]¶
A temporary hack to allow control of language generation decisions using the situation template language.
- all_object_variables: immutablecollections._immutableset.ImmutableSet[adam.situation.templates.phase1_templates.TemplateObjectVariable]¶
All `TemplateObjectVariable`s in the situation, both salient and auxiliary to actions.
- gazed_objects: immutablecollections._immutableset.ImmutableSet[adam.situation.templates.phase1_templates.TemplateObjectVariable]¶
A set of `TemplateObjectVariable`s which are the focus of the speaker. Defaults to all semantic role fillers of situation actions.
- before_action_relations: immutablecollections._immutableset.ImmutableSet[adam.relation.Relation[adam.situation.templates.phase1_templates.TemplateObjectVariable]]¶
The relations which hold in this
SituationTemplate, before, but not necessarily after, any actions which occur.It is not necessary to state every relationship which holds in a situation. Rather this should contain the salient relationships which should be expressed in the linguistic description.
Do not specify those relations here which are implied by any actions which occur. Those are handled automatically.
- after_action_relations: immutablecollections._immutableset.ImmutableSet[adam.relation.Relation[adam.situation.templates.phase1_templates.TemplateObjectVariable]]¶
The relations which hold in this
SituationTemplate, after, but not necessarily before, any actions which occur.It is not necessary to state every relationship which holds in a situation. Rather this should contain the salient relationships which should be expressed in the linguistic description.
Do not specify those relations here which are implied by any actions which occur. Those are handled automatically.
- property has_relations¶
- adam.situation.templates.phase1_templates.all_possible(situation_template, *, ontology, chooser, default_addressee_node=learner[is-learner])¶
Generator for all possible instantiations of situation_template with ontology.
- Return type
- adam.situation.templates.phase1_templates.sampled(situation_template, *, ontology, chooser, max_to_sample, default_addressee_node=learner[is-learner], block_multiple_of_the_same_type)¶
Gets max_to_sample instantiations of situation_template with ontology
- Return type
- adam.situation.templates.phase1_templates.fixed_assignment(situation_template, assignment, *, ontology, chooser, default_addressee_node=learner[is-learner])¶
- Return type
- adam.situation.templates.phase1_templates.object_variable(debug_handle, root_node=thing, *, required_properties=i{}, banned_properties=i{}, added_properties=i{}, banned_ontology_types=i{})¶
Create a
TemplateObjectVariablewith the specified debug_handle which can be filled by any object whoseOntologyNodeis a descendant of (or is exactly) root_node and which possesses all properties in required_properties.Additionally, the template will add all properties in added_properties to the object. Use required_properties for things like “anything filling this variable should be animate.” Use added_properties for things like “whatever fills this variable, make it red.”
You can optionally specify banned_ontology_types to block this variable from being filled by those ontology types or any of their descendants.
- Return type
- adam.situation.templates.phase1_templates.property_variable(debug_handle, root_node=property, *, with_meta_properties=i{}, banned_values=i{})¶
Create a
TemplatePropertyVariablewith the specified debug_handle which can be filled by any property whoseOntologyNodeis a descendant of (or is exactly) root_node and which possesses all properties in with_properties.- Return type
- adam.situation.templates.phase1_templates.action_variable(debug_handle, root_node=action, *, with_subcategorization_frame=None, with_properties=i{})¶
Create a
TemplatePropertyVariablewith the specified debug_handle which can be filled by any property whoseOntologyNodeis a descendant of (or is exactly) root_node and which possesses all properties in with_properties.- Return type
- adam.situation.templates.phase1_templates.color_variable(debug_handle, *, required_properties=i{})¶
Create a
TemplatePropertyVariablewith the specified debug_handle which ranges over all colors in the ontology.- Return type
- class adam.situation.templates.phase1_templates.TemplateVariableAssignment(object_variables_to_fillers=i{}, property_variables_to_fillers=i{}, action_variables_to_fillers=i{})¶
An assignment of ontology types to object and property variables in a situation.
- object_variables_to_fillers: immutablecollections._immutabledict.ImmutableDict[adam.situation.templates.phase1_templates.TemplateObjectVariable, adam.ontology.OntologyNode]¶
- property_variables_to_fillers: immutablecollections._immutabledict.ImmutableDict[adam.situation.templates.phase1_templates.TemplatePropertyVariable, adam.ontology.OntologyNode]¶
- action_variables_to_fillers: immutablecollections._immutabledict.ImmutableDict[adam.situation.templates.phase1_templates.TemplateActionTypeVariable, adam.ontology.OntologyNode]¶
adam.experiment¶
Allows managing experimental configurations in code.
- class adam.experiment.ObserversHolder(*, pre_observers=None, post_observers=None, test_observers=None)¶
This object holds observers states so that the observers remain in a synchronized state when pickle is used
- pre_observers: Optional[Tuple[adam.experiment.observer.DescriptionObserver[[SituationT, LinguisticDescriptionT], PerceptionT]]]¶
- post_observers: Optional[Tuple[adam.experiment.observer.DescriptionObserver[[SituationT, LinguisticDescriptionT], PerceptionT]]]¶
- test_observers: Optional[Tuple[adam.experiment.observer.DescriptionObserver[[SituationT, LinguisticDescriptionT], PerceptionT]]]¶
- class adam.experiment.Experiment(name, *, training_stages, learner_factory, sequence_chooser, pre_example_training_observers=(), post_example_training_observers=(), warm_up_test_instance_groups=(), test_instance_groups=(), test_observers=())¶
A particular experimental configuration.
An experiment specifies what data is fed to the
TopLevelLanguageLearner, whatTopLevelLanguageLearneris used and how it is configured, how the trainedTopLevelLanguageLearneris tested, and what analysis is done on the results.At various stages in the experiment,
DescriptionObservers will be able to examine the descriptions of situations produced by theTopLevelLanguageLearner. Based on their observations, they can provide reports at the end of the experiment.Note that
Experimentobjects should not be reused because components (especially the observers) may maintain state.- training_stages: Sequence[adam.curriculum.InstanceGroup[[SituationT, LinguisticDescriptionT], PerceptionT]]¶
Every experiment has one or more training_stages; simple experiments will have only one, while those which reflect a curriculum which increases in complexity over time may have several. Each of these is an
InstanceGroupproviding triples of aSituationwith the correspondingLinguisticDescriptionandPerceptualRepresentation. There are many ways anInstanceGroupcould be specified, ranging from simply a collection of these triples (e.g.ExplicitWithSituationInstanceGroup) to a complex rule-governed process (e.g.GeneratedFromSituationsInstanceGroup).
- learner_factory: Callable[adam.learner.TopLevelLanguageLearner[PerceptionT, LinguisticDescriptionT]]¶
A no-argument function which will return the
TopLevelLanguageLearnerwhich should be trained.
- sequence_chooser: adam.random_utils.SequenceChooser¶
Used for making all “random” decisions by all components to ensure reproducibility.
- pre_example_training_observers: Tuple[adam.experiment.observer.DescriptionObserver[[SituationT, LinguisticDescriptionT], PerceptionT]]¶
These
DescriptionObservers are provided with the description aTopLevelLanguageLearnerwould give to a situation during training before it is shown the correct description.
- post_example_training_observers: Tuple[adam.experiment.observer.DescriptionObserver[[SituationT, LinguisticDescriptionT], PerceptionT]]¶
Same as pre_example_training_observers except they receive the learner’s description after it has updated itself by seeing the correct description.
- warm_up_test_instance_groups: Sequence[adam.curriculum.InstanceGroup[[Any, LinguisticDescriptionT], PerceptionT]]¶
May optionally be provided if at test time the
TopLevelLanguageLearnerneeds to be shown some observations before evaluation (for example, to introduce some new objects).
- test_instance_groups: Sequence[adam.curriculum.InstanceGroup[[Any, LinguisticDescriptionT], PerceptionT]]¶
The situations and perceptual representations the trained
TopLevelLanguageLearnerwill be asked to describe for evaluation. These are specified byInstanceGroups, just like the training data.
- test_observers: Tuple[adam.experiment.observer.DescriptionObserver[[SituationT, LinguisticDescriptionT], PerceptionT]]¶
These
DescriptionObservers observe the descriptions given by the learner on the test instances. These are what should be used for computing evaluation metrics.
- adam.experiment.execute_experiment(experiment, *, log_path=None, log_hypotheses_every_n_examples=250, learner_logging_path=None, log_learner_state=True, load_learner_state=None, resume_from_latest_logged_state=False, debug_learner_pickling=False, starting_point=0, point_to_log=0, perception_graph_logger=None)¶
Runs an
Experiment.- Return type
Supporting Classes: Learner Internals¶
adam.learner.alignments¶
- class adam.learner.alignments.LanguageConceptAlignment(language, node_to_language_span=i{})¶
Represents an alignment between a
LinguisticDescriptionand anImmutableSet[SemanticNode]where the nodes represent concepts.This can be generified in the future.
node_to_language_span and language_span_to_node are both guaranteed to be sorted by the token spans.
The same span may be aligned to multiple objects (e.g. imagine a scene with multiple “balls”). However, aligned token spans will either be disjoint or identical; partially overlapping aligned token spans are not allowed.
- language: adam.language.LinguisticDescription¶
- node_to_language_span: immutablecollections._immutabledict.ImmutableDict[adam.semantics.ObjectSemanticNode, vistautils.span.Span]¶
- language_span_to_node: immutablecollections._immutablemultidict.ImmutableSetMultiDict[vistautils.span.Span, adam.semantics.SemanticNode]¶
- aligned_nodes: immutablecollections._immutableset.ImmutableSet[adam.semantics.SemanticNode]¶
- static create_unaligned(language)¶
- Return type
- copy_with_added_token_alignments(new_token_alignments)¶
- Return type
- copy_with_new_nodes(new_semantic_nodes_to_surface_templates, *, filter_out_duplicate_alignments, fail_if_surface_templates_do_not_match_language=True)¶
Get a new copy of this alignment, except with the given given semantic nodes aligned to the associated surface templates.
If fail_if_surface_templates_do_not_match_language is True, an exception will be thrown if the associated surface templates are not found in the instance’s tokens. Otherwise, no alignment will be added.
- Return type
- to_surface_template(object_node_to_template_variable, *, language_mode, determiner_prefix_slots=i{}, restrict_to_span=None)¶
Creates a
SurfaceTemplatecorresponding to all or some portion of this alignment.The user specifies which semantic object nodes should have their aligned tokens replaced with wildcard slots in the template using object_node_to_template_variable. For example, if you have the language “Fred ate a sandwich” where “Fred” is aligned to object o_1 and “sandwich” is aligned to object o_2, then calling this method with { SLOT1: o_1, SLOT2: o_2} will produce the template “SLOT1 ate SLOT2”.
determiner_prefix_slots is passed along to the constructed
SurfaceTemplateso it know what nodes should be prefixed with a determiner when the template is instantiated in the future. This is an English-specific hack tracked in https://github.com/isi-vista/adam/issues/498If restrict_to_span is specified, the template will be built only from tokens of
languagewithin that span.- Return type
- class adam.learner.alignments.PerceptionSemanticAlignment(perception_graph, semantic_nodes, functional_concept_to_object_concept=i{})¶
Represents an alignment between a perception graph and a set of semantic nodes representing concepts.
This is used to represent intermediate semantic data passed between new-style learners when describing a perception.
- perception_graph: adam.perception.perception_graph.PerceptionGraph¶
- semantic_nodes: immutablecollections._immutableset.ImmutableSet[adam.semantics.SemanticNode]¶
- functional_concept_to_object_concept: immutablecollections._immutabledict.ImmutableDict[adam.semantics.FunctionalObjectConcept, adam.semantics.ObjectConcept]¶
- static create_unaligned(perception_graph)¶
- Return type
- copy_with_updated_graph_and_added_nodes(*, new_graph, new_nodes)¶
- Return type
- copy_with_mapping(*, mapping)¶
- Return type
- class adam.learner.alignments.LanguagePerceptionSemanticAlignment(*, language_concept_alignment, perception_semantic_alignment)¶
Represents an alignment of both language and perception with some semantic nodes representing concepts.
This is used to represent intermediate semantic data passed between new-style learners when learning from an example.
- language_concept_alignment: adam.learner.alignments.LanguageConceptAlignment¶
- perception_semantic_alignment: adam.learner.alignments.PerceptionSemanticAlignment¶
adam.learner.surface_template¶
Representations of template-with-slots-like patterns over token strings.
- class adam.learner.surface_templates.SurfaceTemplate(elements, language_mode, determiner_prefix_slots=i{})¶
A pattern over
TokenSequenceLinguisticDescriptions.Such a pattern consists of a sequence of token strings and
SyntaxSemanticsVariables.- elements: Tuple[Union[str, adam.semantics.SyntaxSemanticsVariable], ...]¶
- instantiate(template_variable_to_filler, *, attribute_template=False)¶
Turns a template into a
TokenSequenceLinguisticDescriptionby filling in its variables.- Return type
- static for_object_name(object_name, *, language_mode)¶
- Return type
- class adam.learner.surface_templates.SurfaceTemplateBoundToSemanticNodes(surface_template, slot_to_semantic_node)¶
A surface template together with a mapping from its slots to particular semantic roles.
This is used to specify what the thing we are trying to learn the meaning of in a template learner is. For example, “what does ‘X eats Y’ mean, given that we know X is this thing and Y is that other thing in this particular situation.
- surface_template: adam.learner.surface_templates.SurfaceTemplate¶
- slot_to_semantic_node: immutablecollections._immutabledict.ImmutableDict[adam.semantics.SyntaxSemanticsVariable, adam.semantics.ObjectSemanticNode]¶
Supporting Classes: Representing Relations¶
adam.relation¶
- class adam.relation.Relation(relation_type, first_slot, second_slot, *, negated=False)¶
A relationship which holds between two objects or between a
SituationObjectand a Region. The latter case is allowed only for the special relationIN_REGION.This is used for relations in
Situations,ObjectStructuralSchemata, perceptions, etc. since they have the same structure.- relation_type: adam.ontology.OntologyNode¶
- first_slot: _ObjectT¶
- second_slot: Union[_ObjectT, Region[_ObjectT]]¶
- adam.relation.flatten_relations(relation_collections)¶
Convenience method to enable writing sub-object relations in an
ObjectStructuralSchemamore easily.This method simply flattens collections of items in the input iterable.
This is useful because it allows you to write methods for your relations which produce collections of relations as their output. This allows you to use such DSL-like methods to enforce constraints between the relations.
Please see adam.ontology.phase1_ontology.PERSON_SCHEMA for an example of how this is useful.
Supporting Classes: Representing Space¶
adam.geon¶
- class adam.geon.CrossSection(*, has_rotational_symmetry=False, has_reflective_symmetry=False, curved=False)¶
- class adam.geon.Geon(*, cross_section, cross_section_size, axes, generating_axis=NOTHING)¶
- cross_section: adam.geon.CrossSection¶
- cross_section_size: adam.geon.CrossSectionSize¶
- axes: adam.axes.Axes¶
- generating_axis: adam.axis.GeonAxis¶
- copy(*, axis_mapping=None, output_axis_mapping=None)¶
Makes an independent copy of this geon.
This will also have its own axes. This geon’s axes will be mapped using axis_mapping if specified. Otherwise, each axis will be copied. If output_axis_mapping is specified, it will be populated with the mapping between original and copied axes. This is somewhat of a hack, but the information is needed when instantiating perceivable sub-object relations from object schemata.
- Return type
- class adam.geon.MaybeHasGeon(*args, **kwds)¶
- geon: Optional[adam.geon.Geon]¶
- adam.geon.CONSTANT = constant¶
Indicates the size of the cross-section of a geon remains roughly constant along its generating axis.
- adam.geon.SMALL_TO_LARGE = small-to-large¶
Indicates the size of the cross-section of a geon increases along its generating axis.
- adam.geon.LARGE_TO_SMALL = large-to-small¶
Indicates the size of the cross-section of a geon decreases along its generating axis.
- adam.geon.SMALL_TO_LARGE_TO_SMALL = small-to-large-to-small¶
Indicates the size of the cross-section of a geon initially increases along the generating axis, but then decreases.
adam.axes¶
- class adam.axes.AxesInfo(addressee=None, axes_facing=i{})¶
- addressee: Optional[_ObjectT]¶
- axes_facing: immutablecollections._immutablemultidict.ImmutableSetMultiDict[_ObjectT, adam.axis.GeonAxis]¶
- class adam.axes.AxisFunction(*args, **kwds)¶
A procedure for selecting a particular
GeonAxis.This is used in defining the semantics of prepositions and verbs and for defining the spatial relations between parts of an object in
ObjectStructuralSchemata.- to_concrete_axis(axes_info)¶
Select a particular concrete axis.
This function will be provided with an
AxesInfoobject in concrete situations which can be used to determing the relationship of object axes to the speaker and the learner. However, this information is not available in more abstract contexts, likeObjectStructuralSchema, and theAxisFunctionshould throw an exception if called in such a way.- Return type
- copy_remapping_objects(object_map)¶
Copy remapping objects
- Return type
AxisFunction[~_ObjectToT]
- class adam.axes.PrimaryAxisOfObject(object)¶
- to_concrete_axis(axes_info)¶
Select a particular concrete axis.
This function will be provided with an
AxesInfoobject in concrete situations which can be used to determing the relationship of object axes to the speaker and the learner. However, this information is not available in more abstract contexts, likeObjectStructuralSchema, and theAxisFunctionshould throw an exception if called in such a way.- Return type
- copy_remapping_objects(object_map)¶
Copy remapping objects
- Return type
PrimaryAxisOfObject[~_ObjectToT]
- class adam.axes.HorizontalAxisOfObject(object, index)¶
- to_concrete_axis(axes_info)¶
Select a particular concrete axis.
This function will be provided with an
AxesInfoobject in concrete situations which can be used to determing the relationship of object axes to the speaker and the learner. However, this information is not available in more abstract contexts, likeObjectStructuralSchema, and theAxisFunctionshould throw an exception if called in such a way.- Return type
- copy_remapping_objects(object_map)¶
Copy remapping objects
- Return type
HorizontalAxisOfObject[~_ObjectToT]
- class adam.axes.FacingAddresseeAxis(object)¶
- to_concrete_axis(axes_info)¶
Select a particular concrete axis.
This function will be provided with an
AxesInfoobject in concrete situations which can be used to determing the relationship of object axes to the speaker and the learner. However, this information is not available in more abstract contexts, likeObjectStructuralSchema, and theAxisFunctionshould throw an exception if called in such a way.- Return type
- copy_remapping_objects(object_map)¶
Copy remapping objects
- Return type
FacingAddresseeAxis[~_ObjectToT]
- class adam.axes.Axes(*, primary_axis, orienting_axes, axis_relations=i{})¶
- primary_axis: adam.axis.GeonAxis¶
- orienting_axes: immutablecollections._immutableset.ImmutableSet[adam.axis.GeonAxis]¶
- axis_relations: immutablecollections._immutableset.ImmutableSet[adam.relation.Relation[adam.axis.GeonAxis]]¶
- gravitationally_aligned_axis: Optional[adam.axis.GeonAxis]¶
- property all_axes: Iterable[adam.axis.GeonAxis]¶
- copy()¶
Returns a deep copy of this set of axes.
A copy is made of each contained axis. The correspondence of the copies to the previous axes can be tracked because the order of axes is maintained (so the first axis in the copy is a copy of the first axis in the original, etc.)
- Return type
- class adam.axes.HasAxes(*args, **kwds)¶
- axes: adam.axes.Axes¶
adam.axis¶
Supporting Classes: Object Structure¶
adam.ontology.structural_schema¶
- class adam.ontology.structural_schema.ObjectStructuralSchema(ontology_node, sub_objects=i{}, sub_object_relations=i{}, *, geon=None, axes=NOTHING)¶
A hierarchical representation of the internal structure of some type of object.
An
ObjectStructuralSchemarepresents the general pattern of the structure of an object, rather than the structure of any particular object (e.g. people in general, rather than a particular person).For example a person’s body is made up of a head, torso, left arm, right arm, left leg, and right leg. These sub-objects have various relations to one another (e.g. the head is above and supported by the torso).
- Declaring an
ObjectStructuralSchemacan be verbose; see
Relations for additional tips on how to make this more compact.
- ontology_node: adam.ontology.OntologyNode¶
The
OntologyNodethisObjectStructuralSchemarepresents the structure of.
- sub_objects: immutablecollections._immutableset.ImmutableSet[adam.ontology.structural_schema.SubObject]¶
The component parts which make up an object of the type parent_object.
These
SubObjects themselves wrapObjectStructuralSchemas and can therefore themselves have complex internal structure.
- sub_object_relations: immutablecollections._immutableset.ImmutableSet[adam.relation.Relation[adam.ontology.structural_schema.SubObject]]¶
A set of
Relations which define how theSubObjects relate to one another.
- geon: Optional[adam.geon.Geon]¶
- axes: adam.axes.Axes¶
- Declaring an
- class adam.ontology.structural_schema.SubObject(schema, *, debug_handle=None)¶
A sub-component of a generic type of object.
This is for use only in constructing
ObjectStructuralSchemata.- schema: adam.ontology.structural_schema.ObjectStructuralSchema¶
The
ObjectStructuralSchemadescribing the internal structure of this sub-component.For example, an ARM is a sub-component of a PERSON, but ARM itself has a complex structure (e.g. it includes a hand)
Supporting Classes: Action Structure¶
adam.ontology.during¶
- class adam.ontology.during.DuringAction(*, objects_to_paths=i{}, at_some_point=i{}, continuously=i{})¶
- objects_to_paths: immutablecollections._immutablemultidict.ImmutableSetMultiDict[_ObjectT, adam.ontology.phase1_spatial_relations.SpatialPath[_ObjectT]]¶
- at_some_point: immutablecollections._immutableset.ImmutableSet[adam.relation.Relation[_ObjectT]]¶
- continuously: immutablecollections._immutableset.ImmutableSet[adam.relation.Relation[_ObjectT]]¶
- copy_remapping_objects(object_mapping)¶
- Return type
DuringAction[~_NewObjectT]
- accumulate_referenced_objects(object_accumulator)¶
Adds all objects referenced by this
DuringActionto object_accumulator.- Return type
- union(other_during)¶
Unify two DuringAction together.
For unifying spatial paths, the paths from
selfoverride any conflicts inother_during- Return type
DuringAction[~_ObjectT]
adam.ontology.action_description¶
- class adam.ontology.action_description.ActionDescriptionVariable(ontology_node=None, *, properties=i{}, debug_handle=NOTHING)¶
A variable in an action description ranging over objects in Situations.
Unlike most of our classes,
ActionDescriptionVariablehas id-based hashing and equality. This is because two objects with identical properties are nonetheless distinct.- ontology_node: adam.ontology.OntologyNode¶
The
OntologyNodespecifying the type of thing this object is.
- properties: immutablecollections._immutableset.ImmutableSet[adam.ontology.OntologyNode]¶
The
OntologyNodes representing the properties this object has.
- class adam.ontology.action_description.ActionDescriptionFrame(roles_to_variables=i{})¶
- roles_to_variables: immutablecollections._immutabledict.ImmutableDict[adam.ontology.OntologyNode, adam.ontology.action_description.ActionDescriptionVariable]¶
- variables_to_roles: immutablecollections._immutablemultidict.ImmutableSetMultiDict[adam.ontology.action_description.ActionDescriptionVariable, adam.ontology.OntologyNode]¶
- semantic_roles: immutablecollections._immutableset.ImmutableSet[adam.ontology.OntologyNode]¶
- class adam.ontology.action_description.ActionDescription(*, frame, during=None, enduring_conditions=i{}, preconditions=i{}, postconditions=i{}, asserted_properties=i{})¶
-
- during: Optional[adam.ontology.during.DuringAction[adam.ontology.action_description.ActionDescriptionVariable]]¶
- enduring_conditions: immutablecollections._immutableset.ImmutableSet[adam.relation.Relation[adam.ontology.action_description.ActionDescriptionVariable]]¶
- preconditions: immutablecollections._immutableset.ImmutableSet[adam.relation.Relation[adam.ontology.action_description.ActionDescriptionVariable]]¶
- postconditions: immutablecollections._immutableset.ImmutableSet[adam.relation.Relation[adam.ontology.action_description.ActionDescriptionVariable]]¶
- asserted_properties: immutablecollections._immutablemultidict.ImmutableSetMultiDict[adam.ontology.action_description.ActionDescriptionVariable, adam.ontology.OntologyNode]¶
- auxiliary_variables: immutablecollections._immutableset.ImmutableSet[adam.ontology.action_description.ActionDescriptionVariable]¶
These are variables which do not occupy semantic roles but are are still referred to by conditions, paths, etc. An example would be the container for liquid for a “drink” action.
Supporting Classes: Spatial and Size Representation¶
adam.ontology.phase1_spatial_relations¶
- class adam.ontology.phase1_spatial_relations.Distance(name)¶
A distance of the sort used by Landau and Jackendoff to specify spatial regions.
- adam.ontology.phase1_spatial_relations.INTERIOR = interior¶
Figure is within the ground.
- adam.ontology.phase1_spatial_relations.EXTERIOR_BUT_IN_CONTACT = exterior-but-in-contact¶
Figure is outside the ground but contacting it.
- adam.ontology.phase1_spatial_relations.PROXIMAL = proximal¶
Figure is “near” the ground.
- adam.ontology.phase1_spatial_relations.DISTAL = distal¶
Figure is “far” from the ground.
- adam.ontology.phase1_spatial_relations.LANDAU_AND_JACKENDOFF_DISTANCES = [interior, exterior-but-in-contact, proximal, distal]¶
Distances used by Landau and Jackendoff in describing spatial relations.
- class adam.ontology.phase1_spatial_relations.Direction(positive, relative_to_axis)¶
Represents the direction one object may have relative to another.
This is used to specify
Regions.- positive: bool¶
We need to standardize on what “positive” direction means. It is clear for vertical axes but less clear for other things.
- relative_to_axis: Union[adam.axis.GeonAxis, adam.axes.AxisFunction[ReferenceObjectT]]¶
- class adam.ontology.phase1_spatial_relations.Region(reference_object, distance=None, direction=None)¶
A region of space perceived by the learner.
We largely follow
Barbara Landau and Ray Jackendoff. “‘What’ and ‘where’ in spatial language and spatial cognition. Brain and Behavioral Sciences (1993) 16:2.
who analyze spatial relations in term of a
DistanceandDirectionwith respect to some reference_object.At least one of distance and direction must be specified.
- reference_object: ReferenceObjectT¶
- distance: Optional[adam.ontology.phase1_spatial_relations.Distance]¶
- direction: Optional[adam.ontology.phase1_spatial_relations.Direction[ReferenceObjectT]]¶
- class adam.ontology.phase1_spatial_relations.SpatialPath(operator, reference_source_object, reference_destination_object, *, reference_axis=None, orientation_changed=False, properties=i{})¶
- operator: Optional[adam.ontology.phase1_spatial_relations.PathOperator]¶
- reference_source_object: Union[ReferenceObjectT, adam.ontology.phase1_spatial_relations.Region[ReferenceObjectT]]¶
- reference_destination_object: Union[ReferenceObjectT, adam.ontology.phase1_spatial_relations.Region[ReferenceObjectT]]¶
- reference_axis: Optional[Union[adam.axis.GeonAxis, adam.axes.AxisFunction[ReferenceObjectT]]]¶
- properties: immutablecollections._immutableset.ImmutableSet[adam.ontology.OntologyNode]¶
- copy_remapping_objects(object_mapping)¶
- Return type
SpatialPath[~NewObjectT]
- accumulate_referenced_objects(object_accumulator)¶
Adds all objects referenced by this
Regionto object_accumulator.- Return type
- unify(other_path, *, override=False)¶
- Return type
SpatialPath[~ReferenceObjectT]
adam.ontology.phase1_size_relationships¶
- adam.ontology.phase1_size_relationships.build_size_relationships(relative_size_nodes, *, relation_type, opposite_type)¶
Build a dictionary to represent opposite relation_types between OntologyNodes
Used primarily to represent relative size_of relationships, this function takes a ranking of
OntologyNodeobjects by relative_size_nodes which are then assigned the appropriate relation_type and opposite_type respectively.For use see GAILA_PHASE_1_ONTOLOGY.
Supporting classes: Situations¶
adam.situation.high_level_semantics_situation¶
- class adam.situation.high_level_semantics_situation.HighLevelSemanticsSituation(ontology, salient_objects, *, axis_info=AxesInfo(addressee=None, axes_facing=i{}), other_objects=i{}, always_relations=i{}, before_action_relations=i{}, after_action_relations=i{}, actions=i{}, gazed_objects=NOTHING, syntax_hints=i{}, from_template=None)¶
A human-friendly representation of
Situation.- ontology: adam.ontology.ontology.Ontology¶
What
Ontologyitems from the objects, relations, and actions in thisSituationwill come from.
- salient_objects: immutablecollections._immutableset.ImmutableSet[adam.situation.SituationObject]¶
- axis_info: adam.axes.AxesInfo[adam.situation.SituationObject]¶
The salient objects present in a
Situation. This will usually be the ones expressed in the linguistic form.
- other_objects: immutablecollections._immutableset.ImmutableSet[adam.situation.SituationObject]¶
These are other objects appearing in the situation which are less important. For example, the cup holding a liquid being drunk.
These typically correspond to auxiliary variables in
ActionDescriptions.
- all_objects: immutablecollections._immutableset.ImmutableSet[adam.situation.SituationObject]¶
- always_relations: immutablecollections._immutableset.ImmutableSet[adam.relation.Relation[adam.situation.SituationObject]]¶
The relations which hold in this
Situation, both before and after any actions which occur.It is not necessary to state every relationship which holds in a situation. Rather this should contain the salient relationships which should be expressed in the linguistic description.
Do not specify those relations here which are implied by any actions which occur. Those are handled automatically.
- before_action_relations: immutablecollections._immutableset.ImmutableSet[adam.relation.Relation[adam.situation.SituationObject]]¶
The relations which hold in this
Situation, before, but not necessarily after, any actions which occur.It is not necessary to state every relationship which holds in a situation. Rather this should contain the salient relationships which should be expressed in the linguistic description.
Do not specify those relations here which are implied by any actions which occur. Those are handled automatically.
- after_action_relations: immutablecollections._immutableset.ImmutableSet[adam.relation.Relation[adam.situation.SituationObject]]¶
The relations which hold in this
Situation, after, but not necessarily before, any actions which occur.It is not necessary to state every relationship which holds in a situation. Rather this should contain the salient relationships which should be expressed in the linguistic description.
Do not specify those relations here which are implied by any actions which occur. Those are handled automatically.
- actions: immutablecollections._immutableset.ImmutableSet[adam.situation.Action[adam.ontology.OntologyNode, adam.situation.SituationObject]]¶
The actions occurring in this
Situation
- gazed_objects: immutablecollections._immutableset.ImmutableSet[adam.situation.SituationObject]¶
A set of
SituationObjects which are the focus of the speaker. Defaults to all semantic role fillers of situation actions.
Supporting classes: Ontologies¶
adam.ontology¶
Representations for simple ontologies.
These ontologies are intended to be used when describing Situations and writing SituationTemplates.
- class adam.ontology.OntologyNode(handle, inheritable_properties=i{}, *, non_inheritable_properties=i{})¶
A node in an ontology representing some type of object, action, or relation, such as “animate object” or “transfer action.”
An
OntologyNodehas a handle, which is a user-facing description used for debugging and testing only.It may also have a set of local_properties which are inherited by all child nodes.
- inheritable_properties: immutablecollections._immutableset.ImmutableSet[adam.ontology.OntologyNode]¶
Properties of the
OntologyNode, as a set ofOntologyNodes which should be inherited by its children.
- non_inheritable_properties: immutablecollections._immutableset.ImmutableSet[adam.ontology.OntologyNode]¶
Properties of the
OntologyNode, as a set ofOntologyNodes which should not be inherited by its children.
- adam.ontology.CAN_FILL_TEMPLATE_SLOT = can-fill-template-slot¶
A property indicating that a node can be instantiated in a scene.
The ontology contains many nodes which, while useful for various purposes, do not themselves form part of our primary concept vocabulary. This property distinguishes the elements of our core “concept vocabulary” from such auxiliary concepts.
For example, PERSON is one of our core concepts; we have a concept of ARM which is used in defining the
ObjectStructuralSchemaof PERSON but disembodied arms should never be instantiated in templates directly.
- adam.ontology.THING = thing¶
Ancestor of all objects in an
Ontology.By convention this should appear in all
Ontologys.
- adam.ontology.RELATION = relation¶
Ancestor of all relations in an
Ontology.By convention this should appear in all
Ontologys.
- adam.ontology.ACTION = action¶
Ancestor of all actions in an
Ontology.By convention this should appear in all
Ontologys.
- adam.ontology.PROPERTY = property¶
Ancestor of all properties in an
Ontology.By convention this should appear in all
Ontologys.
- adam.ontology.META_PROPERTY = meta-property¶
A property of a property.
For example, whether it is perceivable or binary.
By convention this should appear in all
Ontologys.
- adam.ontology.IN_REGION = in-region¶
Indicates that an object is located in a
Region.This is used to support the Landau and Jackendoff interpretation of prepositions.
- adam.ontology.IS_SPEAKER = is-speaker[binary,perceivable]¶
Indicates that the marked object is the one who is speaking the linguistic description of the situation. This will not be present for all situations. It only makes sense to apply this to sub-types of PERSON, but this is not currently enforced.
- adam.ontology.IS_ADDRESSEE = is-addressee[binary,perceivable]¶
Indicates that the marked object is the one who is addressed. This will not be present for all situations. It only makes sense to apply this to sub-types of PERSON, but this is not currently enforced. E.g. ‘You put the ball on the table.’
- adam.ontology.minimal_ontology_graph()¶
Get the NetworkX DiGraph corresponding to the minimum legal ontology, containing all required nodes.
This is useful as a convenient foundation for building your own ontologies.
adam.ontology.ontology¶
- class adam.ontology.ontology.Ontology(name, graph, structural_schemata=i{}, *, action_to_description=i{}, relations=i{})¶
A hierarchical collection of types for objects, actions, etc.
Types are represented by
OntologyNodes with parent-child relationships.Every
OntologyNodemay have a set of properties which are inherited by all child nodes.Every
Ontologymust contain the special nodesTHING,RELATION,ACTION,PROPERTY,META_PROPERTY, andCAN_FILL_TEMPLATE_SLOT.An
Ontologymust have anObjectStructuralSchemaassociated with eachCAN_FILL_TEMPLATE_SLOTTHING.ObjectStructuralSchemata are inherited, but any which are explicitly-specified will cause any inherited schemata to be ignored.To assist in creating legal
Ontologys, we provideminimal_ontology_graph.- action_to_description: immutablecollections._immutablemultidict.ImmutableSetMultiDict[adam.ontology.OntologyNode, adam.ontology.action_description.ActionDescription]¶
- relations: immutablecollections._immutableset.ImmutableSet[adam.relation.Relation[adam.ontology.OntologyNode]]¶
- subjects_to_relations: immutablecollections._immutablemultidict.ImmutableSetMultiDict[adam.ontology.OntologyNode, adam.relation.Relation[adam.ontology.OntologyNode]]¶
- ancestors(node)¶
- Return type
- structural_schemata(node)¶
- Return type
- is_subtype_of(node, query_supertype)¶
Determines whether node is a sub-type of query_supertype.
- Return type
- nodes_with_properties(root_node, required_properties=i{}, *, banned_properties=i{}, banned_ontology_types=i{})¶
Get all
OntologyNodes which are a dominated by root_node (or are root_node itself) which (a) possess all the required_properties, (b) possess none of the banned_properties, either directly or by inheritance from a dominating node, and (c) are not identical to or descendants of any of banned_ontology_types.- Parameters
root_node (
OntologyNode) – the node to search the ontology tree at and underrequired_properties (
Iterable[OntologyNode]) – the properties (asOntologyNodes) every returned node must havebanned_properties (
AbstractSet[OntologyNode]) – the properties (asOntologyNodes) which no returned node may havebanned_ontology_types (
AbstractSet[OntologyNode]) – nodes in the ontology which (together with the descendants) should never be returned.
- Return type
ImmutableSet[OntologyNode]- Returns
All
OntologyNodes which are a dominated by root_node (or are root_node itself) which possess all the required_properties and none of the banned_properties, either directly or by inheritance from a dominating node, and are not contained in or dominated by any of banned_ontology_types.
- has_property(node, query_property)¶
Checks whether an
OntologyNodehas a given property either directly or via inheritance.- Parameters
node (
OntologyNode) – theOntologyNodebeing inquired aboutquery_property (
OntologyNode) – the property being inquired about.
- Return type
- Returns
Whether node possesses query_property, either directly or via inheritance from a dominating node.
- has_all_properties(node, query_properties, *, banned_properties=i{})¶
Checks if an
OntologyNodehas the given properties, either directly or by inheritance..- Parameters
node (
OntologyNode) – theOntologyNodebeing inquired aboutquery_properties (
Iterable[OntologyNode]) – the properties being inquired aboutbanned_properties (
AbstractSet[OntologyNode]) – this function will return false if node contains any of these properties. Defaults to the empty set.
- Return type
- Returns
Whether node possesses all of query_properties and none of banned_properties, either directly or via inheritance from a dominating node.
- properties_for_node(node)¶
Get all properties a
OntologyNodepossesses.- Parameters
node (
OntologyNode) – theOntologyNodewhose properties you want.- Return type
ImmutableSet[OntologyNode]- Returns
All properties
OntologyNodepossesses, whether directly or by inheritance from a dominating node.
- required_action_description(action_type, semantic_roles)¶
- Return type
adam.language.ontology_dictionary¶
Mappings from Ontologys to particular languages.
- class adam.language.ontology_dictionary.OntologyLexicon(ontology, ontology_node_to_word)¶
A mapping from
OntologyNodes to words.This will become more sophisticated in the future.
- ontology: adam.ontology.ontology.Ontology¶
The ontology this lexicon assigns words to.
- words_for_node(node)¶
Get the translation for an
OntologyNode, if available.- Parameters
node (
OntologyNode) – TheOntologyNodewhose translation you want.- Return type
ImmutableSet[LexiconEntry]- Returns
The translation, if available.
Supporting classes: Linguistic Representation¶
adam.language.language_generator¶
Ways to produce human language descriptions of Situations by rule.
- class adam.language.language_generator.LanguageGenerator(*args, **kwds)¶
A way of describing
Situations using humanLinguisticDescriptions.- abstract generate_language(situation, chooser)¶
Generate a collection of human language descriptions of the given
Situation. :type situation: ~SituationT :param situation: theSituationto describe. :type chooser:SequenceChooser:param chooser: theSequenceChooserto use if any random decisions are required.- Return type
ImmutableSet[~LinguisticDescriptionT]- Returns
A
LinguisticDescriptionof that situation.
- class adam.language.language_generator.ChooseFirstLanguageGenerator(wrapped_generator)¶
A
LanguageGeneratorused to wrap anotherLanguageGeneratorand discard all but its first generated option.- generate_language(situation, chooser)¶
Generate a collection of human language descriptions of the given
Situation. :type situation: ~SituationT :param situation: theSituationto describe. :type chooser:SequenceChooser:param chooser: theSequenceChooserto use if any random decisions are required.- Return type
ImmutableSet[~LinguisticDescriptionT]- Returns
A
LinguisticDescriptionof that situation.
- class adam.language.language_generator.ChooseRandomLanguageGenerator(wrapped_generator, sequence_chooser)¶
A
LanguageGeneratorused to wrap anotherLanguageGeneratorand discard all but one of its descriptions, selected at random using the providedSequenceChooser.- generate_language(situation, chooser)¶
Generate a collection of human language descriptions of the given
Situation. :type situation: ~SituationT :param situation: theSituationto describe. :type chooser:SequenceChooser:param chooser: theSequenceChooserto use if any random decisions are required.- Return type
ImmutableSet[~LinguisticDescriptionT]- Returns
A
LinguisticDescriptionof that situation.
- class adam.language.language_generator.SingleObjectLanguageGenerator(ontology_lexicon)¶
LanguageGeneratorfor describing a single object.Describes a
Situationcontaining aSituationObjectwith a single word: its name according to someOntologyLexicon.This language generator will throw a
ValueErrorif it receives any situation which contains either multipleSituationObjects.- generate_language(situation, chooser)¶
Generate a collection of human language descriptions of the given
Situation. :type situation:LocatedObjectSituation:param situation: theSituationto describe. :type chooser:SequenceChooser:param chooser: theSequenceChooserto use if any random decisions are required.- Return type
ImmutableSet[TokenSequenceLinguisticDescription]- Returns
A
LinguisticDescriptionof that situation.
- class adam.language.language_generator.InSituationLanguageGenerator¶
For situations which receive external perception processing the language is embedded in the situation.
- generate_language(situation, chooser)¶
Generate a collection of human language descriptions of the given
Situation. :type situation:SimulationSituation:param situation: theSituationto describe. :type chooser:SequenceChooser:param chooser: theSequenceChooserto use if any random decisions are required.- Return type
ImmutableSet[TokenSequenceLinguisticDescription]- Returns
A
LinguisticDescriptionof that situation.
adam.language.lexicon¶
Data structures for human language words.
These are not used by the TopLevelLanguageLearner,
but rather for generating the linguistic descriptions for situations.
- class adam.language.lexicon.LexiconEntry(base_form, part_of_speech, properties=i{}, intrinsic_morphosyntactic_properties=i{}, *, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)¶
- base_form: str¶
The base linguistic form for a
LexiconEntry.What form is chosen as the base form varies by part-of-speech and from language to language.
For example, in English, the base form for nouns might be the singular, while the base form for verbs might be the present tense.
- part_of_speech: adam.language.dependency.PartOfSpeechTag¶
- properties: immutablecollections._immutableset.ImmutableSet[adam.language.lexicon.LexiconProperty]¶
- intrinsic_morphosyntactic_properties: immutablecollections._immutableset.ImmutableSet[adam.language.dependency.MorphosyntacticProperty]¶
- class adam.language.lexicon.LexiconProperty(name)¶
A linguistic property that a
LexiconEntrymay possess.For example, singular, active, etc.
adam.language.dependency¶
Representations for dependency trees
- class adam.language.dependency.DependencyTree(graph)¶
A syntactic dependency tree.
This consists of
DependencyTreeTokens connected by edges labelled withDependencyRoles. Edges run from modifiers to heads.Note a
DependencyTreeis not aLinguisticDescriptionbecause it does not provide a surface token string, since the dependencies are unordered.You can pair a
DependencyTreewith a surface order to create anLinearizedDependencyTree.- root: adam.language.dependency.DependencyTreeToken¶
The unique root
DependencyTreeTokenof the tree.This is the single token which does not modify any other token.
- tokens: immutablecollections._immutableset.ImmutableSet[adam.language.dependency.DependencyTreeToken]¶
The set of all
DependencyTreeTokens appearing in this tree.
- modifiers(head)¶
All
DependencyTreeTokens modifying head and theirDependencyRoles.- Return type
ImmutableSet[Tuple[DependencyTreeToken,DependencyRole]]- Returns
A set of (
DependencyTreeToken,DependencyRole) tuples corresponding to all modifications of head.
- class adam.language.dependency.LinearizedDependencyTree(dependency_tree, surface_token_order=(), *, accurate=True)¶
A
DependencyTreepaired with a surface word order.- dependency_tree: adam.language.dependency.DependencyTree¶
- surface_token_order: Tuple[adam.language.dependency.DependencyTreeToken, ...]¶
- as_token_sequence()¶
Get this description as a tuple of token strings.
- Return type
- Returns
A tuple of token strings describing this
LinguisticDescription
- class adam.language.dependency.PartOfSpeechTag(name)¶
Part-of-speech tags.
For example, “noun”, “verb”, etc.
Every
DependencyTreeTokenmust be assigned one of these. We provide constants for the Universal Dependencies POS tags inadam.language.dependency.universal_dependencies.
- class adam.language.dependency.DependencyTreeToken(token, part_of_speech, morphosyntactic_properties=i{})¶
A single word in a
DependencyTree- part_of_speech: adam.language.dependency.PartOfSpeechTag¶
- morphosyntactic_properties: immutablecollections._immutableset.ImmutableSet[adam.language.dependency.MorphosyntacticProperty]¶
- class adam.language.dependency.DependencyRole(name)¶
The syntactic relationship between two nodes in a
DependencyTree.We provide constants for the Universal Dependencies syntactic relations in
adam.language.dependency.universal_dependencies.
- class adam.language.dependency.DependencyTreeLinearizer¶
A method for supplying a particular order to the words in a
DependencyTree.- abstract linearize(dependency_tree)¶
Determine a surface word order for a
DependencyTree. :type dependency_tree:DependencyTree:param dependency_tree: TheDependencyTreeto determine a surface word order for.- Return type
- Returns
A
LinearizedDependencyTreepairing the inputDependencyTreewith a surface word order.
- adam.language.dependency.HEAD = head¶
A special
DependencyRoleused to indicate the position of the head word itself when constructing aRoleOrderDependencyTreeLinearizer.
- class adam.language.dependency.RoleOrderDependencyTreeLinearizer(head_pos_to_role_order=i{})¶
Assigns an order to the words of a
DependencyTreeby ordering modifiers relation to their head based only on the syntactic relation they have to the head.The ordering of multiple modifiers with the same syntactic relation is undefined (Issue #57).
- linearize(dependency_tree)¶
Determine a surface word order for a
DependencyTree. :type dependency_tree:DependencyTree:param dependency_tree: TheDependencyTreeto determine a surface word order for.- Return type
- Returns
A
LinearizedDependencyTreepairing the inputDependencyTreewith a surface word order.
adam.language.dependency.universal_dependencies¶
Universal Dependecies part-of-speech tags and syntactic relations.
These are provided for convenience when writing LanguageGenerators.
Supporting classes: Perceptual Representation¶
adam.perception.developmental_primitive_perception¶
- class adam.perception.developmental_primitive_perception.DevelopmentalPrimitivePerceptionFrame(perceived_objects, *, axis_info=AxesInfo(addressee=None, axes_facing=i{}), property_assertions=i{}, relations=i{})¶
A static snapshot of a
Situationbased on developmentally-motivated perceptual primitives.This represents a situation as
a set of
ObjectPerceptions, with one corresponding to each object in the scene (e.g. a ball, Mom, Dad, etc.)a set of
PropertyPerceptions which associate aObjectPerceptionwith perceived properties of various sort (e.g. color, sentience, etc.)a set of
Relations which describe the learner’s perception of how twoObjectPerceptions are related.
This is the default perceptual representation for at least the first phase of the ADAM project.
- perceived_objects: immutablecollections._immutableset.ImmutableSet[adam.perception.ObjectPerception]¶
a set of
ObjectPerceptions, with one corresponding to each object in the scene (e.g. a ball, Mom, Dad, etc.)
- axis_info: adam.axes.AxesInfo[adam.perception.ObjectPerception]¶
- property_assertions: immutablecollections._immutableset.ImmutableSet[adam.perception.developmental_primitive_perception.PropertyPerception]¶
a set of
PropertyPerceptions which associate aObjectPerceptionwith perceived properties of various sort (e.g. color, sentience, etc.)
- relations: immutablecollections._immutableset.ImmutableSet[adam.relation.Relation[adam.perception.ObjectPerception]]¶
- a set of
Relations which describe the learner’s perception of how two ObjectPerceptions are related.
Symmetric relations should be included as two separate relations, one in each direction.
- a set of
- class adam.perception.developmental_primitive_perception.PropertyPerception(perceived_object)¶
A learner’s perception that the perceived_object possesses a certain property.
The particular property is specified in a sub-class dependent way.
- perceived_object¶
- class adam.perception.developmental_primitive_perception.HasBinaryProperty(perceived_object, binary_property)¶
A learner’s perception that perceived_object possesses the given flag_property.
- binary_property¶
- class adam.perception.developmental_primitive_perception.RgbColorPerception(red, green, blue)¶
A perceived color.
- inverse()¶
- Return type
- class adam.perception.developmental_primitive_perception.HasColor(perceived_object, color)¶
A learner’s perception that perceived_object has the
RgbColorPerceptioncolor.- color¶
adam.perception.high_level_semantics_situation_to_developmental_primitive_perception¶
..automodule:: adam.perception.high_level_semantics_situation_to_developmental_primitive_perception
adam.perception.perception_graph¶
Code for representing DevelopmentalPrimitivePerceptionFrames as directed graphs
and for matching patterns against such graph.
Such patterns could be used to implement object recognition,
among other things.
This file first defines PerceptionGraphs,
then defines PerceptionGraphPatterns to match them.
Readers should start with PerceptionGraphProtocol, PerceptionGraph,
and PerceptionGraphPattern before reading other parts of this module.
- class adam.perception.perception_graph.Incrementer(initial_value=0)¶
- adam.perception.perception_graph.EdgeLabel = typing.Union[adam.ontology.OntologyNode, str, adam.ontology.phase1_spatial_relations.Direction[typing.Any]]¶
This is the core information stored on a perception graph edge. This is wrapped in
TemporallyScopedEdgeLabelbefore actually being applied to a dynamicDiGraphedge.
- adam.perception.perception_graph.valid_edge_label(inst, attr, value)¶
Wraps
assert_valid_edge_labelfor use as an attrs validator.- Return type
- class adam.perception.perception_graph.TemporalScope(value)¶
In a dynamic situation, specifies the relationship of perception graph edges to the perception frames.
- BEFORE = 'before'¶
Indicates a relationship holds in the first frame.
- AFTER = 'after'¶
Indicates a relationship holds in the second frame.
- DURING = 'during'¶
Indicates a relationship continuously holds in the interval between frames.
- AT_SOME_POINT = 'at-some-point'¶
Indicates a relationship holds at some point in the interval between frames.
- class adam.perception.perception_graph.TemporallyScopedEdgeLabel(attribute, temporal_specifiers=i{})¶
An edge attribute in a
PerceptionGraphwhich is annotated for what times it holds true.These should only be used in
PerceptionGraphs representing dynamic situations, in which every edge label should be wrapped with this class.- attribute: Union[adam.ontology.OntologyNode, str, adam.ontology.phase1_spatial_relations.Direction[Any]]¶
- temporal_specifiers: immutablecollections._immutableset.ImmutableSet[adam.perception.perception_graph.TemporalScope]¶
- static for_dynamic_perception(attribute, when=typing.Union[adam.perception.perception_graph.TemporalScope, typing.Iterable[adam.perception.perception_graph.TemporalScope]])¶
- Return type
- adam.perception.perception_graph.REFERENCE_OBJECT_LABEL = reference-object¶
Edge label in a
PerceptionGraphlinking aRegionto its reference object.
- adam.perception.perception_graph.PRIMARY_AXIS_LABEL = primary-axis¶
Edge label in a
PerceptionGraphlinking aGeonto its primaryGeonAxis.
- adam.perception.perception_graph.HAS_AXIS_LABEL = has-axis¶
Edge label in a
PerceptionGraphlinking any node of typeHasAxesto its associated axes.
- adam.perception.perception_graph.GENERATING_AXIS_LABEL = generating-axis¶
Edge label in a
PerceptionGraphlinking aGeonto its generatingGeonAxis.
- adam.perception.perception_graph.HAS_GEON_LABEL = geon¶
Edge label in a
PerceptionGraphlinking anObjectPerceptionto its associatedGeon.
- adam.perception.perception_graph.HAS_PROPERTY_LABEL = has-property¶
Edge label in a
PerceptionGraphlinking anObjectPerceptionto its associatedPropertyPerception.
- adam.perception.perception_graph.FACING_OBJECT_LABEL = facing-axis¶
Edge label in a
PerceptionGraphlinking aGeonAxisto anObjectPerceptionit is facing
- adam.perception.perception_graph.REFERENCE_AXIS_LABEL = reference-axis¶
Edge label in a
PerceptionGraphlinking aSpatialPathto its reference axis.
- adam.perception.perception_graph.HAS_PATH_LABEL = has-path¶
Edge label in a
PerceptionGraphlinking an object to theSpatialPathwhich it takes in a dynamic situation.
- adam.perception.perception_graph.HAS_PATH_OPERATOR = has-path-operator¶
Edge label in a
PerceptionGraphlinking aSpatialPathto itsPathOperator
- adam.perception.perception_graph.HAS_STROKE_LABEL = has-stroke-label¶
Edge label in a
PerceptionGraphlinking an object cluster to one of the `ObjectStroke`s which make up the object.
- adam.perception.perception_graph.ADJACENT_STROKE_LABEL = adjacent-stroke-label¶
Edge label in a
PerceptionGraphlinking anObjectStroketo anotherObjectStroketo indicate the two are adjacent. The relationship is symmetric even though the edge is not.
- adam.perception.perception_graph.ORIENTATION_CHANGED_PROPERTY = orientation-changed¶
Property used in perception graphs to indicate an orientation change while an object traverses a path.
- class adam.perception.perception_graph.PerceptionGraphProtocol(*args, **kwds)¶
-
- render_to_file(graph_name, output_file, *, match_correspondence_ids=i{}, robust=True, replace_node_labels=i{})¶
Debugging tool to render the graph to PDF using dot.
- Return type
- class adam.perception.perception_graph.PerceptionGraph(graph, dynamic=False)¶
Represents a
DevelopmentalPrimitivePerceptionFrameas a directed graph.Perception graphs may be static (representing a single snapshot of a situation) or dynamic, representing a changing situation. This is encoded by the _dynamic field.
ObjectPerceptions, properties,Geons,GeonAxiss, andRegions are nodes. Edges should have the label attribute mapped to anEdgeLabel, if the graph is static, or toTemporallyScopedEdgeLabel, if dynamic.These can be matched against by
PerceptionGraphPatterns.- static from_frame(frame)¶
Gets the
PerceptionGraphcorresponding to aDevelopmentalPrimitivePerceptionFrame.- Return type
- static from_dynamic_perceptual_representation(perceptual_representation)¶
- Return type
- static add_temporal_scopes_to_edges(digraph, temporal_scopes)¶
Modifies the given digraph in place, applying the given
TemporalScopes to all edges. This new graph will be dynamic.Note that this should only be applied to static perception digraphs.
- Return type
- static from_simulated_frame(frame)¶
- Return type
- static from_dynamic_simulated_perception_frame(perceptual_representation)¶
- Return type
- copy_with_temporal_scopes(temporal_scopes)¶
Produces a copy of this perception graph with the given
TemporalScopes applied to all edges. This new graph will be dynamic.This graph must be a static graph or a
RuntimeErrorwill be raised.- Return type
- subgraph_by_nodes(nodes_to_keep)¶
- Return type
- count_nodes_matching(node_predicate)¶
- render_to_file(graph_name, output_file, *, match_correspondence_ids=i{}, robust=True, replace_node_labels=i{})¶
Debugging tool to render the graph to PDF using dot.
If this graph has been matched against a pattern, the matched nodes can be highlighted and given labels which show what the correspond to in a pattern by supplying match_correspondence_ids which maps graph nodes to the desired correspondence labels.
If robust is True (the default), then this will suppress crashes on failures.
- Return type
- successors(graph_node)¶
- class adam.perception.perception_graph.PerceptionGraphPattern(graph, dynamic=False)¶
A pattern which can match
PerceptionGraphs.Such patterns could be used, for example, to represent a learner’s knowledge of an object for object recognition.
- check_isomorphism(other_graph)¶
Compares two pattern graphs and returns true if they are isomorphic, including edges and node attributes.
- Return type
- matcher(graph_to_match_against, *, debug_callback=None, match_mode, allowed_matches=i{})¶
Creates an object representing an attempt to match this pattern against graph_to_match_against.
- Return type
- static from_schema(object_schema, *, perception_generator)¶
Creates a pattern for recognizing an object based on its object_schema.
- Return type
- static from_graph(perception_graph)¶
Creates a pattern for recognizing an object based on its perception_graph.
- Return type
- static from_ontology_node(node, ontology, *, perception_generator)¶
Creates a pattern for recognizing an obect based on its ontology_node
- Return type
- static phase3_pattern(node)¶
- Return type
- copy_with_temporal_scopes(required_temporal_scopes)¶
Produces a copy of this perception graph pattern where all edge predicates now require that the edge in the target graph being matched hold at all of the required_temporal_scopes.
The new pattern will be dynamic.
This pattern must be a static graph or a
RuntimeErrorwill be raised.- Return type
- render_to_file(graph_name, output_file, *, match_correspondence_ids=i{}, robust=True, replace_node_labels=i{})¶
Debugging tool to render the pattern to PDF using dot.
If this pattern has been matched against a
PerceptionGraph, the matched nodes can be highlighted and given labels which show what the correspond to in a pattern by supplying match_correspondence_ids which maps graph nodes to the desired correspondence labels.- Return type
- intersection(graph_pattern, *, debug_callback=None, graph_logger=None, ontology, allowed_matches=i{}, match_mode, trim_after_match=None)¶
Determine the largest partial match between two `PerceptionGraphPattern`s
The algorithm used is approximate and is not guaranteed to return the largest possible match.
- Return type
- class adam.perception.perception_graph.DumpPartialMatchCallback(render_path, seconds_to_wait_before_rendering=0, dump_every_x_calls=100)¶
Helper callable class for debugging purposes. An instance of this object can be provided as the
debug_callbackargument ofGraphMatching.matchto render the match search process at every 100 time steps. We start rendering after the first 60 seconds.
- class adam.perception.perception_graph.PerceptionGraphPatternFromGraph(perception_graph_pattern, perception_graph_node_to_pattern_node)¶
See
PerceptionGraphPattern.from_graph- perception_graph_pattern: adam.perception.perception_graph.PerceptionGraphPattern¶
- perception_graph_node_to_pattern_node: immutablecollections._immutabledict.ImmutableDict[Union[adam.perception.ObjectPerception, adam.ontology.OntologyNode, Tuple[adam.ontology.phase1_spatial_relations.Region[Any], int], Tuple[adam.geon.Geon, int], adam.axis.GeonAxis, adam.geon.CrossSection, adam.semantics.SemanticNode, adam.ontology.phase1_spatial_relations.SpatialPath[adam.perception.ObjectPerception], adam.ontology.phase1_spatial_relations.PathOperator, adam.perception.perception_graph_nodes.GraphNode, adam.perception.perception_graph_nodes.ObjectStroke], adam.perception.perception_graph_predicates.NodePredicate]¶
- class adam.perception.perception_graph.PatternMatching(pattern, graph_to_match_against, matching_pattern_against_pattern=NOTHING, *, match_mode, debug_callback=None, allowed_matches=i{})¶
An attempt to align a
PerceptionGraphPatternto nodes in aPerceptionGraph.This is equivalent to finding a sub-graph of graph_to_match which is isomorphic to pattern. Currently we only handle node-induced sub-graph isomorphisms, but we might really want edge-induced: https://github.com/isi-vista/adam/issues/400
- graph_to_match_against: adam.perception.perception_graph.PerceptionGraphProtocol¶
- debug_callback: Optional[Callable[[networkx.classes.digraph.DiGraph, Dict[Any, Any]], None]]¶
- allowed_matches: immutablecollections._immutablemultidict.ImmutableSetMultiDict[Any, Any]¶
- class MatchFailure(*, pattern, graph, pattern_node_to_graph_node_for_largest_match, last_failed_pattern_node, largest_match_pattern_subgraph=NOTHING, largest_match_graph_subgraph=NOTHING)¶
Indicates a failed attempt at matching a
PerceptionGraphPattern.pattern_node_to_graph_node_for_largest_match indicates the partial match found with the largest number of nodes. Note that this is not necessarily the largest possible partial match, just the largest one encountered during the search process before the algorithm decided that a full match was not possible.
last_failed_pattern_node is that the last pattern node attempted to be matched at the point the algorithm decided a match was impossible. Note that this is not necessarily the node responsible for the match failure; it could fail due to the edge predicate on the connecting edge, or it could fail due to there being no proper match for a pattern node which had no good alignment earlier in the match process.
- pattern_node_to_graph_node_for_largest_match: Mapping[Any, Any]¶
- last_failed_pattern_node: adam.perception.perception_graph_predicates.NodePredicate¶
- largest_match_pattern_subgraph: adam.perception.perception_graph.PerceptionGraphPattern¶
- largest_match_graph_subgraph: networkx.classes.digraph.DiGraph¶
- matches(*, use_lookahead_pruning, suppress_multiple_alignments_to_same_nodes=True, initial_partial_match=i{}, graph_logger=None)¶
Attempt the matching and returns a generator over the set of possible matches.
If suppress_multiple_alignments_to_same_nodes is True (default True), then only the first alignment encountered for a given set of nodes will be returned. This prevents you from e.g. getting multiple matches for different ways of aligning axes for symmetric objects. The cost is that we need to keep around a memory of previous node matches.
matching_pattern_against_pattern indicates you are matching one pattern against another, rather than against a perception graph. This should get split off into its own distinct method: https://github.com/isi-vista/adam/issues/487
- Return type
- first_match_or_failure_info(*, initial_partial_match=i{}, graph_logger=None)¶
Gets the first match encountered of the pattern against the graph (which one is first is deterministic but undefined) or a
PatternMatching.MatchFailuregiving debugging information about a failed match attempt.- Return type
- relax_pattern_until_it_matches(*, graph_logger=None, ontology, min_ratio=None, trim_after_match)¶
Prunes or relaxes the pattern for this matching until it successfully matches using heuristic rules.
If a matching relaxed
PerceptionGraphPatterncan be found, it is returned. Otherwise, None is returned.- Return type
- class adam.perception.perception_graph.PerceptionGraphPatternMatch(*, matched_pattern, graph_matched_against, matched_sub_graph, pattern_node_to_matched_graph_node)¶
Represents a match of a
PerceptionGraphPatternagainst aPerceptionGraph.- matched_pattern: adam.perception.perception_graph.PerceptionGraphPattern¶
- graph_matched_against: adam.perception.perception_graph.PerceptionGraphProtocol¶
- matched_sub_graph: adam.perception.perception_graph.PerceptionGraphProtocol¶
- pattern_node_to_matched_graph_node: Mapping[adam.perception.perception_graph_predicates.NodePredicate, Union[adam.perception.ObjectPerception, adam.ontology.OntologyNode, Tuple[adam.ontology.phase1_spatial_relations.Region[Any], int], Tuple[adam.geon.Geon, int], adam.axis.GeonAxis, adam.geon.CrossSection, adam.semantics.SemanticNode, adam.ontology.phase1_spatial_relations.SpatialPath[adam.perception.ObjectPerception], adam.ontology.phase1_spatial_relations.PathOperator, adam.perception.perception_graph_nodes.GraphNode, adam.perception.perception_graph_nodes.ObjectStroke]]¶
A mapping of pattern nodes from
matched_patternto the nodes inmatched_sub_graphthey were aligned to.
- class adam.perception.perception_graph.EdgePredicate¶
Super-class for pattern graph edges.
- abstract dot_label()¶
Edge label to use when rendering patterns as graphs using dot.
- Return type
- reverse_in_dot_graph()¶
In the dot graph, should this edge be treated as reversed for layout purposes? (dot tries to put the sources of edges to the left of the destinations)
- Return type
- class adam.perception.perception_graph.HoldsAtTemporalScopePredicate(wrapped_edge_predicate, temporal_scopes)¶
EdgePredicatewhich matches an edge with aTemporallyScopedEdgeLabelwhose attribute matches wrapped_edge_predicate and which has at least the temporal scope temporal_scope (but may have others).- wrapped_edge_predicate: adam.perception.perception_graph.EdgePredicate¶
- temporal_scopes: immutablecollections._immutableset.ImmutableSet[adam.perception.perception_graph.TemporalScope]¶
- class adam.perception.perception_graph.AnyEdgePredicate¶
EdgePredicatewhich matches any edge.
- class adam.perception.perception_graph.RelationTypeIsPredicate(relation_type)¶
EdgePredicatewhich matches a relation of the given type.- relation_type: adam.ontology.OntologyNode¶
- reverse_in_dot_graph()¶
In the dot graph, should this edge be treated as reversed for layout purposes? (dot tries to put the sources of edges to the left of the destinations)
- Return type
- class adam.perception.perception_graph.DirectionPredicate(reference_direction)¶
EdgePredicatewhich matches aDirectionobject annotating an edge between aRegionand anObjectPerception.- reference_direction: adam.ontology.phase1_spatial_relations.Direction[Any]¶
- static exactly_matching(direction)¶
- Return type
- adam.perception.perception_graph.GOVERNED = governed¶
An object match governed in a preposition relationship
- adam.perception.perception_graph.MODIFIED = modified¶
An object match modified in a preposition relationship
- class adam.perception.perception_graph.GraphLogger(log_directory, enable_graph_rendering, serialize_graphs=False)¶
- log_directory: pathlib.Path¶
- log_graph(graph, level, msg, *args, match_correspondence_ids=i{}, graph_name=None)¶
- Return type
- adam.perception.perception_graph.raise_graph_exception(exception_message, graph)¶
- adam.perception.perception_graph.edge_equals_ignoring_temporal_scope(edge_label, query)¶
- Return type
adam.perception.marr¶
Visual Representation based on
David Marr, Vision, Chapter 5 “Presenting Shapes for Recognition”.
This code and its comments presumes familiarity with that chapter; the book should be available from any university library (usually digitally).
Marr’s represent objects in terms of hierarchical structures with object-centered coordinate
systems, which he calls “models”. Marr’s exposition does not sharply distinguish a
model-as-a-representation-of-a-particular-object-instance from
model-as-a-representation-of-an-object-class. In code we need to be a little more explicit, so
we call the former a Marr3dObject and the latter a Marr3dModel.
Unfortunately, Python’s lack of forward declarations means the classes in this module are not declared in the best order for reading. I suggest reading them in the following order:
These describe the model-as-representation-of-a-particular-object-instance (e.g. the particular
truck I see right now):
- Marr3dObject
- Cylinder
- AdjunctRelation
These describe model-as-a-representation-of-an-object-class (e.g. trucks in general):
- Marr3dModel
- CylinderRange
- AdjunctRelationRange
These describe the structures which can be used to match instances to class (that is, to identify what it is you are looking at): - MarrModelIndex - SpecificityIndex - SpecificityIndexNode
- class adam.perception.marr.Cylinder(*, length_in_meters, diameter_in_meters)¶
A cylinder, irrespective of orientation.
Marr’s representation builds objects up from generalized cylinders; right now we only represent cylinders with circular cross-sections.
- class adam.perception.marr.CylinderRange(*, length_range_in_meters, diameter_range_in_meters)¶
Represents a set of possible cylinders.
This is used for object recognition.
- class adam.perception.marr.AdjunctRelation(*, s_relative_to_reference_length, orientation)¶
Specifies the location and orientation of an cylinder \(S\) with respect to another cylinder \(A\).
“Two three-dimensional vectors are required to specify the position in space of one axis relative to another… The first vector, written in cylindrical coordinates \((p, r, \Theta)\), defines the starting point of \(S\) relative to \(A\); the second vector, written in spherical coordinates \((\iota, \phi, s)\), specified \(S\) itself. We shall call the combined specification \((p, r, \Theta, \iota, \phi, s)\) an adjunct relation for \(S\) relative to \(A\).” ~ Marr, Vision, p. 308
The above dimensions are explained in the figure below:
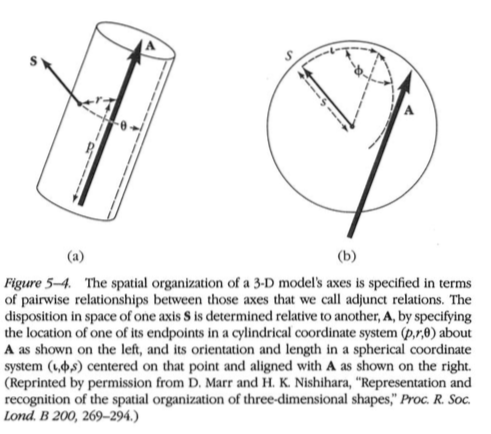
We maintain the coordinate names from Marr, but we split those which are also applicable to
Marr3dObjects into the classAdjunctRelation.Orientationfor they can be reused there.- class Orientation(*, theta_in_degrees, iota_in_degrees, phi_in_degrees, p_relative_to_reference_length, r_relative_to_reference_width)¶
-
- static create_same_as_reference_cylinder()¶
- Return type
- orientation: adam.perception.marr.AdjunctRelation.Orientation¶
- static create_same_as_reference_cylinder()¶
Gets the adjunct relation which specifies that the described cylinder is exactly the same as the reference cylinder.
This is frequently used for defining the principal cylinders of
Marr3dModels.- Return type
- class adam.perception.marr.AdjunctRelationRange(*, p_relative_to_reference_length, r_relative_to_reference_width, theta_in_degrees, iota_in_degrees, phi_in_degrees, s_relative_to_reference_length)¶
Represents a set of acceptable adjunct relations for object identification.
“Because the precision with which 3-D model scan represent a shape varies, it is appropriate to represent the angles and lengths that occur in an adjunct relation in a system that is also capable of variable precision, For instance, one might wish to state that a particular axis, like the arm component of the human 3-D model… is connected rather precisely at one end of the torso (that is, that value of \(p\) is exactly \(0\)), but with \(\Theta\) only coarsely specified and with very little restriction on \(\iota\).
- class adam.perception.marr.Marr3dObject(*, bounding_cylinder, principal_cylinder, components=i{})¶
A Marr-ian representation of a particular object instance (e.g. a particular truck I see, not trucks in general).
An object is defined by:
A bounding_cylinder specifying a
Cylinder(which Marr calls an “Axis”) which bounds the object.components, a
typing.Mappingof sub-objects toAdjunctRelation.Orientations describing their orientation relative to the primary model. We only need the orientation information rather than the full adjunct relation becauseMarr3dObject‘s possess absolute size information.a principal_cylinder which defines the
Cylinderthat sub-object positions and orientations are defined with respect to. This is normally the model_axis but may differ in some cases. To use Marr’s example, for a “human being” object it is more convenient to specify the sub-components with respect to the “torso” axis than the bounding cylinder axis.
TODO: add orientation information - https://github.com/isi-vista/adam/issues/21
- bounding_cylinder: adam.perception.marr.Cylinder¶
- principal_cylinder: adam.perception.marr.Cylinder¶
- components: immutablecollections._immutabledict.ImmutableDict[adam.perception.marr.Marr3dObject, adam.perception.marr.AdjunctRelation.Orientation]¶
- static create_from_bounding_cylinder(bounding_cylinder)¶
- Return type
- class adam.perception.marr.Marr3dModel(*, bounding_cylinder_range, principal_cylinder_relative_to_bounding_cylinder, components)¶
A Marr-ian representation of a recognition model for a class of instances (e.g. “trucks in general”, not a particular truck).
A model is defined by:
A bounding_cylinder_range specifying the constraints on the possible sizes of the bounding_cylinder of any
Marr3dObjectmatching this model. Marr calls this the “model axis.”a principal_cylinder_relative_to_bounding_cylinder which gives the
AdjunctRelationspecifying the size and orientation of the principal cylinder for this model relative to the bounding cylinder. Marr refers to this as the “principal axis”; the sizes and orientations of all sub-components are relative to this axis/cylinder.This adjunct relation often specifies a cylinder equal to the bounding cylinder, but may differ in some cases. To use Marr’s example, for a “human being” object it is more convenient to specify the sub-components with respect to the “torso” cylinder/axis than the bounding cylinder cylinder/axis.
components, a
typing.Mappingof sub-models toAdjunctRelations describing their orientation relative to the primary model.
- bounding_cylinder_range: adam.perception.marr.CylinderRange¶
- principal_cylinder_relative_to_bounding_cylinder: adam.perception.marr.AdjunctRelation¶
- components: Mapping[adam.perception.marr.Marr3dModel, adam.perception.marr.AdjunctRelation]¶
Supporting classes: Curricula¶
adam.curriculum¶
Code to specify what is shown to TopLevelLanguageLearners and in what order.
- class adam.curriculum.InstanceGroup(*args, **kwds)¶
An
InstanceGroupcan provide triples of (optional)Situations,LinguisticDescriptions, andPerceptualRepresentations for use in training or testingTopLevelLanguageLearners with theExperimentclass.- abstract instances()¶
The instances in the order they should be shown to the
TopLevelLanguageLearner.- Return type
Iterable[Tuple[Optional[~SituationT], ~LinguisticDescriptionT,PerceptualRepresentation[~PerceptionT]]]
- class adam.curriculum.ExplicitWithoutSituationInstanceGroup(name, instances)¶
A collection of instances where the user explicitly specifies the
LinguisticDescriptions andPerceptualRepresentations but not theSituations.- instances()¶
The instances in the order they should be shown to the
TopLevelLanguageLearner.- Return type
Iterable[Tuple[~SituationT, ~LinguisticDescriptionT,PerceptualRepresentation[~PerceptionT]]]
- class adam.curriculum.ExplicitWithSituationInstanceGroup(name, instances)¶
A collection of instances where the user explicitly specifies the the
Situations,LinguisticDescriptions, andPerceptualRepresentations.- instances()¶
The instances in the order they should be shown to the
TopLevelLanguageLearner.- Return type
Iterable[Tuple[Optional[~SituationT], ~LinguisticDescriptionT,PerceptualRepresentation[~PerceptionT]]]
- class adam.curriculum.GeneratedFromSituationsInstanceGroup(name, situations, language_generator, perception_generator, chooser)¶
Creates a collection of instances by taking an iterable of
Situations and deriving theLinguisticDescriptions andPerceptualRepresentations by applying the language_generator and perception_generator, respectively.- instances()¶
The instances in the order they should be shown to the
TopLevelLanguageLearner.- Return type
Iterable[Tuple[Optional[~SituationT], ~LinguisticDescriptionT,PerceptualRepresentation[~PerceptionT]]]
- class adam.curriculum.AblatedLanguageSituationsInstanceGroup(name, instances)¶
-
- instances()¶
The instances in the order they should be shown to the
TopLevelLanguageLearner.- Return type
Iterable[Tuple[Optional[~SituationT], ~LinguisticDescriptionT,PerceptualRepresentation[~PerceptionT]]]
- class adam.curriculum.AblatedPerceptionSituationsInstanceGroup(name, situations, language_generator, chooser)¶
Creates a collection of instances by taking an iterable of
Situations and deriving theLinguisticDescriptions andPerceptualRepresentations by applying the language_generator and perception_generator, respectively.- instances()¶
The instances in the order they should be shown to the
TopLevelLanguageLearner.- Return type
Iterable[Tuple[Optional[~SituationT], ~LinguisticDescriptionT,PerceptualRepresentation[~PerceptionT]]]
adam.curriculum.curriculum_utils¶
- adam.curriculum.curriculum_utils.CHOOSER_FACTORY()¶
- adam.curriculum.curriculum_utils.TEST_CHOOSER_FACTORY()¶
- adam.curriculum.curriculum_utils.standard_object(debug_handle, root_node=inanimate-object[inanimate[binary]], *, required_properties=(), banned_properties=i{}, added_properties=i{}, banned_ontology_types=i{})¶
Preferred method of generating template objects as this automatically prevent liquids and body parts from object selection.
- Return type
- adam.curriculum.curriculum_utils.phase3_standard_object(debug_handle, root_node=thing, *, required_properties=(), banned_properties=i{}, added_properties=i{}, banned_ontology_types=i{})¶
Preferred method of generating phase 3 template objects as this automatically limits to concepts which are marked as Phase 3 and prevents liquids and body parts from object selection.
- Return type
- adam.curriculum.curriculum_utils.body_part_object(debug_handle, root_node=thing, *, required_properties=(), banned_properties=i{}, added_properties=i{})¶
Method for generating template objects that are body parts.
- Return type
- adam.curriculum.curriculum_utils.phase1_instances(description, situations, perception_generator=HighLevelSemanticsSituationToDevelopmentalPrimitivePerceptionGenerator(ontology=Ontology(gaila-phase-1), color_perception_mode=<ColorPerceptionMode.CONTINUOUS: 1>, _gaze_strategy=<adam.perception.high_level_semantics_situation_to_developmental_primitive_perception.GazePerceivedPerfectly object>), language_generator=SimpleRuleBasedEnglishLanguageGenerator(_ontology_lexicon=OntologyLexicon(ontology=Ontology(gaila-phase-1), _ontology_node_to_word=i{food[edible]: {LexiconEntry(base_form='food', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='foods', verb_form_sg3_prs=None)}, person[animate[binary],self-moving[binary],can-jump,is-human[binary]]: {LexiconEntry(base_form='person', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='people', verb_form_sg3_prs=None)}, ground: {LexiconEntry(base_form='ground', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='grounds', verb_form_sg3_prs=None)}, animal[animate[binary]]: {LexiconEntry(base_form='animal', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='animals', verb_form_sg3_prs=None)}, Mom: {LexiconEntry(base_form='Mom', part_of_speech=propn, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, ball[can-fill-template-slot,person-can-have,rollable,red[can-fill-template-slot],blue[can-fill-template-slot],green[can-fill-template-slot],black[can-fill-template-slot],white[can-fill-template-slot]]: {LexiconEntry(base_form='ball', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='balls', verb_form_sg3_prs=None)}, watermelon[can-fill-template-slot,person-can-have,rollable,green[can-fill-template-slot]]: {LexiconEntry(base_form='watermelon', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='watermelons', verb_form_sg3_prs=None)}, table[flat[binary],can-fill-template-slot,can-have-things-on-them,has-space-under,can-be-sat-on,light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot]]: {LexiconEntry(base_form='table', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='tables', verb_form_sg3_prs=None)}, put: {LexiconEntry(base_form='put', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='puts')}, push: {LexiconEntry(base_form='push', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='pushes')}, book[can-fill-template-slot,can-have-things-on-them,person-can-have,red[can-fill-template-slot],blue[can-fill-template-slot],green[can-fill-template-slot],integrated-experiment-selector]: {LexiconEntry(base_form='book', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='books', verb_form_sg3_prs=None)}, house[hollow[binary],can-fill-template-slot,red[can-fill-template-slot],blue[can-fill-template-slot],white[can-fill-template-slot]]: {LexiconEntry(base_form='house', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='houses', verb_form_sg3_prs=None)}, car[hollow[binary],can-fill-template-slot,self-moving[binary],can-have-things-on-them,rollable,red[can-fill-template-slot],blue[can-fill-template-slot],black[can-fill-template-slot],white[can-fill-template-slot]]: {LexiconEntry(base_form='car', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='cars', verb_form_sg3_prs=None)}, water[liquid[binary]]: {LexiconEntry(base_form='water', part_of_speech=noun, properties=i{LexiconProperty(name='mass-noun')}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, juice[liquid[binary]]: {LexiconEntry(base_form='juice', part_of_speech=noun, properties=i{LexiconProperty(name='mass-noun')}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, cup[hollow[binary],can-fill-template-slot,person-can-have,red[can-fill-template-slot],blue[can-fill-template-slot],green[can-fill-template-slot],transparent[can-fill-template-slot],integrated-experiment-selector]: {LexiconEntry(base_form='cup', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='cups', verb_form_sg3_prs=None)}, box[hollow[binary],can-fill-template-slot,can-have-things-on-them,person-can-have,light-brown[can-fill-template-slot]]: {LexiconEntry(base_form='box', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='boxes', verb_form_sg3_prs=None)}, chair[can-fill-template-slot,can-have-things-on-them,can-be-sat-on,light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot]]: {LexiconEntry(base_form='chair', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='chairs', verb_form_sg3_prs=None)}, head[hollow[binary],can-fill-template-slot,can-have-things-on-them,is-body-part]: {LexiconEntry(base_form='head', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='heads', verb_form_sg3_prs=None)}, paper[flat[binary],can-fill-template-slot,person-can-have,can-have-things-on-them,white[can-fill-template-slot],two-dimensional[binary]]: {LexiconEntry(base_form='paper', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='papers', verb_form_sg3_prs=None)}, bear[can-fill-template-slot,can-jump,black[can-fill-template-slot],dark-brown[can-fill-template-slot],integrated-experiment-selector]: {LexiconEntry(base_form='bear', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='bears', verb_form_sg3_prs=None)}, cow[can-fill-template-slot,can-have-things-on-them,can-jump,white[can-fill-template-slot],black[can-fill-template-slot]]: {LexiconEntry(base_form='cow', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='cows', verb_form_sg3_prs=None)}, beef[can-fill-template-slot,person-can-have,red[can-fill-template-slot],dark-brown[can-fill-template-slot]]: {LexiconEntry(base_form='beef', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='beefs', verb_form_sg3_prs=None)}, chicken[can-fill-template-slot,edible,dark-brown[can-fill-template-slot],light-brown[can-fill-template-slot]]: {LexiconEntry(base_form='chicken', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='chickens', verb_form_sg3_prs=None)}, bed[flat[binary],can-fill-template-slot,can-have-things-on-them,has-space-under,can-be-sat-on,white[can-fill-template-slot],blue[can-fill-template-slot],black[can-fill-template-slot],light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot]]: {LexiconEntry(base_form='bed', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='beds', verb_form_sg3_prs=None)}, milk[liquid[binary]]: {LexiconEntry(base_form='milk', part_of_speech=noun, properties=i{LexiconProperty(name='mass-noun')}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, hand[can-fill-template-slot,can-manipulate-objects,is-body-part,animate[binary]]: {LexiconEntry(base_form='hand', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='hands', verb_form_sg3_prs=None)}, truck[blue[can-fill-template-slot],red[can-fill-template-slot],hollow[binary],can-fill-template-slot,self-moving[binary],can-have-things-on-them]: {LexiconEntry(base_form='truck', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='trucks', verb_form_sg3_prs=None)}, door[can-fill-template-slot,light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot]]: {LexiconEntry(base_form='door', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='doors', verb_form_sg3_prs=None)}, hat[can-fill-template-slot,person-can-have,black[can-fill-template-slot]]: {LexiconEntry(base_form='hat', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='hats', verb_form_sg3_prs=None)}, cookie[can-fill-template-slot,person-can-have,rollable,light-brown[can-fill-template-slot]]: {LexiconEntry(base_form='cookie', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='cookies', verb_form_sg3_prs=None)}, Dad: {LexiconEntry(base_form='Dad', part_of_speech=propn, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, baby: {LexiconEntry(base_form='baby', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='babies', verb_form_sg3_prs=None)}, dog[can-fill-template-slot,can-jump,black[can-fill-template-slot],white[can-fill-template-slot],light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot],integrated-experiment-selector]: {LexiconEntry(base_form='dog', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='dogs', verb_form_sg3_prs=None)}, cat[can-fill-template-slot,can-jump,black[can-fill-template-slot],white[can-fill-template-slot],light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot],integrated-experiment-selector]: {LexiconEntry(base_form='cat', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='cats', verb_form_sg3_prs=None)}, bird[can-fill-template-slot,can-fly,red[can-fill-template-slot],blue[can-fill-template-slot],black[can-fill-template-slot],white[can-fill-template-slot],integrated-experiment-selector]: {LexiconEntry(base_form='bird', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='birds', verb_form_sg3_prs=None)}, go: {LexiconEntry(base_form='go', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='goes')}, come: {LexiconEntry(base_form='come', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='comes')}, take: {LexiconEntry(base_form='take', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='takes')}, eat: {LexiconEntry(base_form='eat', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='eats')}, give[transfer-of-possession]: {LexiconEntry(base_form='give', part_of_speech=verb, properties=i{LexiconProperty(name='allows-ditransitive')}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='gives')}, spin: {LexiconEntry(base_form='spin', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='spins')}, sit: {LexiconEntry(base_form='sit', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='sits')}, drink: {LexiconEntry(base_form='drink', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='drinks')}, fall: {LexiconEntry(base_form='fall', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='falls')}, throw[transfer-of-possession]: {LexiconEntry(base_form='throw', part_of_speech=verb, properties=i{LexiconProperty(name='allows-ditransitive')}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='throws')}, pass[transfer-of-possession]: {LexiconEntry(base_form='pass', part_of_speech=verb, properties=i{LexiconProperty(name='allows-ditransitive')}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='passes')}, move: {LexiconEntry(base_form='move', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='moves')}, walk: {LexiconEntry(base_form='walk', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='walks')}, jump: {LexiconEntry(base_form='jump', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='jumps')}, has: {LexiconEntry(base_form='have', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='has')}, roll: {LexiconEntry(base_form='roll', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='rolls')}, fly: {LexiconEntry(base_form='fly', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='flies')}, red[can-fill-template-slot]: {LexiconEntry(base_form='red', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, blue[can-fill-template-slot]: {LexiconEntry(base_form='blue', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, green[can-fill-template-slot]: {LexiconEntry(base_form='green', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, black[can-fill-template-slot]: {LexiconEntry(base_form='black', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, white[can-fill-template-slot]: {LexiconEntry(base_form='white', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, transparent[can-fill-template-slot]: {LexiconEntry(base_form='transparent', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, light-brown[can-fill-template-slot]: {LexiconEntry(base_form='light brown', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, dark-brown[can-fill-template-slot]: {LexiconEntry(base_form='dark brown', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}}), _dependency_tree_linearizer=RoleOrderDependencyTreeLinearizer(_head_pos_to_role_order=i{verb: (nsubj, head, iobj, obj, advmod, obl), noun: (case:sptial, nmod:poss, det, nummod, amod, head, mark, isattr, nmod, case:poss), propn: (case:sptial, amod, head, nmod, case:poss)})))¶
Convenience method for more compactly creating sub-curricula for phase 1.
- adam.curriculum.curriculum_utils.phase2_instances(description, situations, perception_generator=HighLevelSemanticsSituationToDevelopmentalPrimitivePerceptionGenerator(ontology=Ontology(gaila-phase-2), color_perception_mode=<ColorPerceptionMode.CONTINUOUS: 1>, _gaze_strategy=<adam.perception.high_level_semantics_situation_to_developmental_primitive_perception.GazePerceivedPerfectly object>), language_generator=SimpleRuleBasedEnglishLanguageGenerator(_ontology_lexicon=OntologyLexicon(ontology=Ontology(gaila-phase-2), _ontology_node_to_word=i{food[edible]: {LexiconEntry(base_form='food', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='foods', verb_form_sg3_prs=None)}, person[animate[binary],self-moving[binary],can-jump,is-human[binary]]: {LexiconEntry(base_form='person', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='people', verb_form_sg3_prs=None)}, ground: {LexiconEntry(base_form='ground', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='grounds', verb_form_sg3_prs=None)}, animal[animate[binary]]: {LexiconEntry(base_form='animal', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='animals', verb_form_sg3_prs=None)}, Mom: {LexiconEntry(base_form='Mom', part_of_speech=propn, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, ball[can-fill-template-slot,person-can-have,rollable,red[can-fill-template-slot],blue[can-fill-template-slot],green[can-fill-template-slot],black[can-fill-template-slot],white[can-fill-template-slot]]: {LexiconEntry(base_form='ball', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='balls', verb_form_sg3_prs=None)}, watermelon[can-fill-template-slot,person-can-have,rollable,green[can-fill-template-slot]]: {LexiconEntry(base_form='watermelon', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='watermelons', verb_form_sg3_prs=None)}, table[flat[binary],can-fill-template-slot,can-have-things-on-them,has-space-under,can-be-sat-on,light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot]]: {LexiconEntry(base_form='table', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='tables', verb_form_sg3_prs=None)}, put: {LexiconEntry(base_form='put', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='puts')}, push: {LexiconEntry(base_form='push', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='pushes')}, book[can-fill-template-slot,can-have-things-on-them,person-can-have,red[can-fill-template-slot],blue[can-fill-template-slot],green[can-fill-template-slot],integrated-experiment-selector]: {LexiconEntry(base_form='book', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='books', verb_form_sg3_prs=None)}, house[hollow[binary],can-fill-template-slot,red[can-fill-template-slot],blue[can-fill-template-slot],white[can-fill-template-slot]]: {LexiconEntry(base_form='house', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='houses', verb_form_sg3_prs=None)}, car[hollow[binary],can-fill-template-slot,self-moving[binary],can-have-things-on-them,rollable,red[can-fill-template-slot],blue[can-fill-template-slot],black[can-fill-template-slot],white[can-fill-template-slot]]: {LexiconEntry(base_form='car', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='cars', verb_form_sg3_prs=None)}, water[liquid[binary]]: {LexiconEntry(base_form='water', part_of_speech=noun, properties=i{LexiconProperty(name='mass-noun')}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, juice[liquid[binary]]: {LexiconEntry(base_form='juice', part_of_speech=noun, properties=i{LexiconProperty(name='mass-noun')}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, cup[hollow[binary],can-fill-template-slot,person-can-have,red[can-fill-template-slot],blue[can-fill-template-slot],green[can-fill-template-slot],transparent[can-fill-template-slot],integrated-experiment-selector]: {LexiconEntry(base_form='cup', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='cups', verb_form_sg3_prs=None)}, box[hollow[binary],can-fill-template-slot,can-have-things-on-them,person-can-have,light-brown[can-fill-template-slot]]: {LexiconEntry(base_form='box', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='boxes', verb_form_sg3_prs=None)}, chair[can-fill-template-slot,can-have-things-on-them,can-be-sat-on,light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot]]: {LexiconEntry(base_form='chair', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='chairs', verb_form_sg3_prs=None)}, head[hollow[binary],can-fill-template-slot,can-have-things-on-them,is-body-part]: {LexiconEntry(base_form='head', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='heads', verb_form_sg3_prs=None)}, paper[flat[binary],can-fill-template-slot,person-can-have,can-have-things-on-them,white[can-fill-template-slot],two-dimensional[binary]]: {LexiconEntry(base_form='paper', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='papers', verb_form_sg3_prs=None)}, bear[can-fill-template-slot,can-jump,black[can-fill-template-slot],dark-brown[can-fill-template-slot],integrated-experiment-selector]: {LexiconEntry(base_form='bear', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='bears', verb_form_sg3_prs=None)}, cow[can-fill-template-slot,can-have-things-on-them,can-jump,white[can-fill-template-slot],black[can-fill-template-slot]]: {LexiconEntry(base_form='cow', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='cows', verb_form_sg3_prs=None)}, beef[can-fill-template-slot,person-can-have,red[can-fill-template-slot],dark-brown[can-fill-template-slot]]: {LexiconEntry(base_form='beef', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='beefs', verb_form_sg3_prs=None)}, chicken[can-fill-template-slot,edible,dark-brown[can-fill-template-slot],light-brown[can-fill-template-slot]]: {LexiconEntry(base_form='chicken', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='chickens', verb_form_sg3_prs=None)}, bed[flat[binary],can-fill-template-slot,can-have-things-on-them,has-space-under,can-be-sat-on,white[can-fill-template-slot],blue[can-fill-template-slot],black[can-fill-template-slot],light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot]]: {LexiconEntry(base_form='bed', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='beds', verb_form_sg3_prs=None)}, milk[liquid[binary]]: {LexiconEntry(base_form='milk', part_of_speech=noun, properties=i{LexiconProperty(name='mass-noun')}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, hand[can-fill-template-slot,can-manipulate-objects,is-body-part,animate[binary]]: {LexiconEntry(base_form='hand', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='hands', verb_form_sg3_prs=None)}, truck[blue[can-fill-template-slot],red[can-fill-template-slot],hollow[binary],can-fill-template-slot,self-moving[binary],can-have-things-on-them]: {LexiconEntry(base_form='truck', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='trucks', verb_form_sg3_prs=None)}, door[can-fill-template-slot,light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot]]: {LexiconEntry(base_form='door', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='doors', verb_form_sg3_prs=None)}, hat[can-fill-template-slot,person-can-have,black[can-fill-template-slot]]: {LexiconEntry(base_form='hat', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='hats', verb_form_sg3_prs=None)}, cookie[can-fill-template-slot,person-can-have,rollable,light-brown[can-fill-template-slot]]: {LexiconEntry(base_form='cookie', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='cookies', verb_form_sg3_prs=None)}, Dad: {LexiconEntry(base_form='Dad', part_of_speech=propn, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, baby: {LexiconEntry(base_form='baby', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='babies', verb_form_sg3_prs=None)}, dog[can-fill-template-slot,can-jump,black[can-fill-template-slot],white[can-fill-template-slot],light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot],integrated-experiment-selector]: {LexiconEntry(base_form='dog', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='dogs', verb_form_sg3_prs=None)}, cat[can-fill-template-slot,can-jump,black[can-fill-template-slot],white[can-fill-template-slot],light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot],integrated-experiment-selector]: {LexiconEntry(base_form='cat', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='cats', verb_form_sg3_prs=None)}, bird[can-fill-template-slot,can-fly,red[can-fill-template-slot],blue[can-fill-template-slot],black[can-fill-template-slot],white[can-fill-template-slot],integrated-experiment-selector]: {LexiconEntry(base_form='bird', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='birds', verb_form_sg3_prs=None)}, go: {LexiconEntry(base_form='go', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='goes')}, come: {LexiconEntry(base_form='come', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='comes')}, take: {LexiconEntry(base_form='take', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='takes')}, eat: {LexiconEntry(base_form='eat', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='eats')}, give[transfer-of-possession]: {LexiconEntry(base_form='give', part_of_speech=verb, properties=i{LexiconProperty(name='allows-ditransitive')}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='gives')}, spin: {LexiconEntry(base_form='spin', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='spins')}, sit: {LexiconEntry(base_form='sit', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='sits')}, drink: {LexiconEntry(base_form='drink', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='drinks')}, fall: {LexiconEntry(base_form='fall', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='falls')}, throw[transfer-of-possession]: {LexiconEntry(base_form='throw', part_of_speech=verb, properties=i{LexiconProperty(name='allows-ditransitive')}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='throws')}, pass[transfer-of-possession]: {LexiconEntry(base_form='pass', part_of_speech=verb, properties=i{LexiconProperty(name='allows-ditransitive')}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='passes')}, move: {LexiconEntry(base_form='move', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='moves')}, walk: {LexiconEntry(base_form='walk', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='walks')}, jump: {LexiconEntry(base_form='jump', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='jumps')}, has: {LexiconEntry(base_form='have', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='has')}, roll: {LexiconEntry(base_form='roll', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='rolls')}, fly: {LexiconEntry(base_form='fly', part_of_speech=verb, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs='flies')}, red[can-fill-template-slot]: {LexiconEntry(base_form='red', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, blue[can-fill-template-slot]: {LexiconEntry(base_form='blue', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, green[can-fill-template-slot]: {LexiconEntry(base_form='green', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, black[can-fill-template-slot]: {LexiconEntry(base_form='black', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, white[can-fill-template-slot]: {LexiconEntry(base_form='white', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, transparent[can-fill-template-slot]: {LexiconEntry(base_form='transparent', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, light-brown[can-fill-template-slot]: {LexiconEntry(base_form='light brown', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, dark-brown[can-fill-template-slot]: {LexiconEntry(base_form='dark brown', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, cup-2[hollow[binary],can-fill-template-slot,person-can-have,red[can-fill-template-slot],blue[can-fill-template-slot],green[can-fill-template-slot],transparent[can-fill-template-slot]]: {LexiconEntry(base_form='cup', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='cups', verb_form_sg3_prs=None)}, cup-3[hollow[binary],can-fill-template-slot,person-can-have,red[can-fill-template-slot],blue[can-fill-template-slot],green[can-fill-template-slot],transparent[can-fill-template-slot]]: {LexiconEntry(base_form='cup', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='cups', verb_form_sg3_prs=None)}, cup-4[hollow[binary],can-fill-template-slot,person-can-have,red[can-fill-template-slot],blue[can-fill-template-slot],green[can-fill-template-slot],transparent[can-fill-template-slot]]: {LexiconEntry(base_form='cup', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='cups', verb_form_sg3_prs=None)}, chair-2[can-fill-template-slot,can-have-things-on-them,can-be-sat-on,light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot]]: {LexiconEntry(base_form='chair', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='chairs', verb_form_sg3_prs=None)}, chair-3[can-fill-template-slot,can-have-things-on-them,can-be-sat-on,light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot]]: {LexiconEntry(base_form='chair', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='chairs', verb_form_sg3_prs=None)}, chair-4[can-fill-template-slot,can-have-things-on-them,can-be-sat-on,light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot]]: {LexiconEntry(base_form='chair', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='chairs', verb_form_sg3_prs=None)}, chair-5[can-fill-template-slot,can-have-things-on-them,can-be-sat-on,light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot]]: {LexiconEntry(base_form='chair', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='chairs', verb_form_sg3_prs=None)}}), _dependency_tree_linearizer=RoleOrderDependencyTreeLinearizer(_head_pos_to_role_order=i{verb: (nsubj, head, iobj, obj, advmod, obl), noun: (case:sptial, nmod:poss, det, nummod, amod, head, mark, isattr, nmod, case:poss), propn: (case:sptial, amod, head, nmod, case:poss)})))¶
Convenience method for more compactly creating sub-curricula for phase 2.
- adam.curriculum.curriculum_utils.phase3_instances(description, situations, language_generator=SimpleRuleBasedEnglishLanguageGenerator(_ontology_lexicon=OntologyLexicon(ontology=Ontology(gaila-phase-3), _ontology_node_to_word=i{apple[can-fill-template-slot,person-can-have]: {LexiconEntry(base_form='apple', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='apples', verb_form_sg3_prs=None)}, orange[can-fill-template-slot,person-can-have]: {LexiconEntry(base_form='orange', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='oranges', verb_form_sg3_prs=None)}, banana[can-fill-template-slot,person-can-have]: {LexiconEntry(base_form='banana', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='bananas', verb_form_sg3_prs=None)}, ball[can-fill-template-slot,person-can-have,rollable,red[can-fill-template-slot],blue[can-fill-template-slot],green[can-fill-template-slot],black[can-fill-template-slot],white[can-fill-template-slot]]: {LexiconEntry(base_form='ball', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='balls', verb_form_sg3_prs=None)}, book[can-fill-template-slot,can-have-things-on-them,person-can-have,red[can-fill-template-slot],blue[can-fill-template-slot],green[can-fill-template-slot],integrated-experiment-selector]: {LexiconEntry(base_form='book', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='books', verb_form_sg3_prs=None)}, table[flat[binary],can-fill-template-slot,can-have-things-on-them,has-space-under,can-be-sat-on,light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot]]: {LexiconEntry(base_form='table', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='tables', verb_form_sg3_prs=None)}, chair[can-fill-template-slot,can-have-things-on-them,can-be-sat-on,light-brown[can-fill-template-slot],dark-brown[can-fill-template-slot]]: {LexiconEntry(base_form='chair', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='chairs', verb_form_sg3_prs=None)}, sofa[can-fill-template-slot]: {LexiconEntry(base_form='sofa', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='sofas', verb_form_sg3_prs=None)}, block[person-can-have]: {LexiconEntry(base_form='block', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='blocks', verb_form_sg3_prs=None)}, pyramid[can-fill-template-slot,person-can-have,triangular[can-fill-template-slot]]: {LexiconEntry(base_form='pyramid', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='pyramids', verb_form_sg3_prs=None)}, sphere[can-fill-template-slot,person-can-have,spherical[can-fill-template-slot]]: {LexiconEntry(base_form='sphere', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='spheres', verb_form_sg3_prs=None)}, cube[can-fill-template-slot,person-can-have,cubic[can-fill-template-slot]]: {LexiconEntry(base_form='cube', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='cubes', verb_form_sg3_prs=None)}, box[hollow[binary],can-fill-template-slot,can-have-things-on-them,person-can-have,light-brown[can-fill-template-slot]]: {LexiconEntry(base_form='box', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='boxes', verb_form_sg3_prs=None)}, floor[can-fill-template-slot]: {LexiconEntry(base_form='floor', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='floors', verb_form_sg3_prs=None)}, window[can-fill-template-slot]: {LexiconEntry(base_form='window', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='windows', verb_form_sg3_prs=None)}, cup[hollow[binary],can-fill-template-slot,person-can-have,red[can-fill-template-slot],blue[can-fill-template-slot],green[can-fill-template-slot],transparent[can-fill-template-slot],integrated-experiment-selector]: {LexiconEntry(base_form='cup', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='cups', verb_form_sg3_prs=None)}, mug[can-fill-template-slot,person-can-have]: {LexiconEntry(base_form='mug', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='mugs', verb_form_sg3_prs=None)}, paper[flat[binary],can-fill-template-slot,person-can-have,can-have-things-on-them,white[can-fill-template-slot],two-dimensional[binary]]: {LexiconEntry(base_form='paper', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='papers', verb_form_sg3_prs=None)}, desk[can-fill-template-slot]: {LexiconEntry(base_form='desk', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='desks', verb_form_sg3_prs=None)}, toy_truck[can-fill-template-slot,person-can-have]: {LexiconEntry(base_form='truck', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='trucks', verb_form_sg3_prs=None)}, toy_sedan[can-fill-template-slot,person-can-have]: {LexiconEntry(base_form='car', part_of_speech=noun, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form='cars', verb_form_sg3_prs=None)}, triangular[can-fill-template-slot]: {LexiconEntry(base_form='triangular', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, spherical[can-fill-template-slot]: {LexiconEntry(base_form='spherical', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, cubic[can-fill-template-slot]: {LexiconEntry(base_form='cubic', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, red[can-fill-template-slot]: {LexiconEntry(base_form='red', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, blue[can-fill-template-slot]: {LexiconEntry(base_form='blue', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, green[can-fill-template-slot]: {LexiconEntry(base_form='green', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, black[can-fill-template-slot]: {LexiconEntry(base_form='black', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, white[can-fill-template-slot]: {LexiconEntry(base_form='white', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, brown[can-fill-template-slot]: {LexiconEntry(base_form='brown', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, purple[can-fill-template-slot]: {LexiconEntry(base_form='purple', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, yellow[can-fill-template-slot]: {LexiconEntry(base_form='yellow', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, orange-color[can-fill-template-slot]: {LexiconEntry(base_form='orange', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, plastic[can-fill-template-slot]: {LexiconEntry(base_form='plastic', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}, wood[can-fill-template-slot]: {LexiconEntry(base_form='wood', part_of_speech=adj, properties=i{}, intrinsic_morphosyntactic_properties=i{}, counting_classifier=None, plural_form=None, verb_form_sg3_prs=None)}}), _dependency_tree_linearizer=RoleOrderDependencyTreeLinearizer(_head_pos_to_role_order=i{verb: (nsubj, head, iobj, obj, advmod, obl), noun: (case:sptial, nmod:poss, det, nummod, amod, head, mark, isattr, nmod, case:poss), propn: (case:sptial, amod, head, nmod, case:poss)})))¶
Convenience method for more compactly creating sub-curricula for phase 3.
- adam.curriculum.curriculum_utils.make_background(salient, all_objects)¶
Convenience method for determining which objects in the situation should be background objects
- Return type
- adam.curriculum.curriculum_utils.make_noise_objects(noise_objects, banned_ontology_types=i{})¶
- Return type
- adam.curriculum.curriculum_utils.learner_template_factory()¶
- Return type
- adam.curriculum.curriculum_utils.shuffle_curriculum(curriculum, *, rng)¶
- Return type
Sequence[Tuple[~SituationT, ~LinguisticDescriptionT,PerceptualRepresentation[~PerceptionT]]]
Supporting classes: Experiments¶
adam.experiment.observer¶
- class adam.experiment.observer.DescriptionObserver(*args, **kwds)¶
Something which can observe the descriptions produced by
TopLevelLanguageLearners.Typically a
DescriptionObserverwill provide some sort of summary of its observations when its report method is called.- abstract observe(situation, true_description, perceptual_representation, predicted_scene_description)¶
Observe a description provided by a
TopLevelLanguageLearner.- Parameters
situation (
Optional[~SituationT]) – TheSituationbeing described. This is optional.true_description (
LinguisticDescription) – The “gold-standard” description of the situation.perceptual_representation (
PerceptualRepresentation[~PerceptionT]) – ThePerceptualRepresentationof the situation received by theTopLevelLanguageLearner.predicted_scene_description (
TopLevelLanguageLearnerDescribeReturn) –TopLevelLanguageLearnerDescribeReturn
- Return type
- class adam.experiment.observer.TopChoiceExactMatchObserver(name)¶
Log how often the top-scoring predicted
LinguisticDescriptionfor aSituationexactly matches the expectedLinguisticDescription.If there are multiple predicted
LinguisticDescriptions with the same score, which one is compared to determine matching is undefined.- observe(situation, true_description, perceptual_representation, predicted_scene_description)¶
Observe a description provided by a
TopLevelLanguageLearner.- Parameters
situation (
Optional[~SituationT]) – TheSituationbeing described. This is optional.true_description (
LinguisticDescription) – The “gold-standard” description of the situation.perceptual_representation (
PerceptualRepresentation[~PerceptionT]) – ThePerceptualRepresentationof the situation received by theTopLevelLanguageLearner.predicted_scene_description (
TopLevelLanguageLearnerDescribeReturn) –TopLevelLanguageLearnerDescribeReturn
- Return type
- class adam.experiment.observer.CandidateAccuracyObserver(name, accuracy_to_txt=False, txt_path='accuracy_out.txt')¶
Log how often the ‘gold’ description is present in the learner’s candidate descriptions. Provide an accuracy score.
- observe(situation, true_description, perceptual_representation, predicted_scene_description)¶
Observe a description provided by a
TopLevelLanguageLearner.- Parameters
situation (
Optional[~SituationT]) – TheSituationbeing described. This is optional.true_description (
LinguisticDescription) – The “gold-standard” description of the situation.perceptual_representation (
PerceptualRepresentation[~PerceptionT]) – ThePerceptualRepresentationof the situation received by theTopLevelLanguageLearner.predicted_scene_description (
TopLevelLanguageLearnerDescribeReturn) –TopLevelLanguageLearnerDescribeReturn
- Return type
- report()¶
Take some action based on the observations.
Typically, this will be to write a report either to the console, to a file, or both.
- Return type
- class adam.experiment.observer.PrecisionRecallObserver(name, *, make_report=False, txt_path='accuracy_out.txt', robust=True)¶
Log information to calculate the learners precision and recall
- observe(situation, true_description, perceptual_representation, predicted_scene_description)¶
Observe a description provided by a
TopLevelLanguageLearner.- Parameters
situation (
Optional[~SituationT]) – TheSituationbeing described. This is optional.true_description (
LinguisticDescription) – The “gold-standard” description of the situation.perceptual_representation (
PerceptualRepresentation[~PerceptionT]) – ThePerceptualRepresentationof the situation received by theTopLevelLanguageLearner.predicted_scene_description (
TopLevelLanguageLearnerDescribeReturn) –TopLevelLanguageLearnerDescribeReturn
- Return type
- report()¶
Take some action based on the observations.
Typically, this will be to write a report either to the console, to a file, or both.
- Return type
- class adam.experiment.observer.LearningProgressHtmlLogger(output_file_str, html_dumper, *, include_links_to_images=False, num_pretty_descriptions=3, sort_by_length=False)¶
-
- html_dumper: adam.curriculum_to_html.CurriculumToHtmlDumper¶
- static create_logger(params)¶
- Return type
- pre_observer(*, params=Parameters(_data=i{}, namespace_prefix=()), experiment_group_dir=None)¶
- Return type
- post_observer(*, params=Parameters(_data=i{}, namespace_prefix=()), experiment_group_dir=None)¶
- Return type
- test_observer(*, params=Parameters(_data=i{}, namespace_prefix=()), experiment_group_dir=None)¶
- Return type
- pre_observer_log(predicted_descriptions, accuracy=None, precision=None, recall=None)¶
- Return type
- post_observer_log(*, observer_name, instance_number, situation, true_description, perceptual_representation, predicted_descriptions, test_mode, accuracy=None, precision=None, recall=None)¶
- class adam.experiment.observer.HTMLLoggerPreObserver(name, *, html_logger, candidate_accuracy_observer, precision_recall_observer)¶
Logs the true description and learner’s descriptions throughout the learning process.
- html_logger: adam.experiment.observer.LearningProgressHtmlLogger¶
- candidate_accuracy_observer: Optional[adam.experiment.observer.CandidateAccuracyObserver]¶
- precision_recall_observer: Optional[adam.experiment.observer.PrecisionRecallObserver]¶
- observe(situation, true_description, perceptual_representation, predicted_scene_description)¶
Observe a description provided by a
TopLevelLanguageLearner.- Parameters
situation (
Optional[~SituationT]) – TheSituationbeing described. This is optional.true_description (
LinguisticDescription) – The “gold-standard” description of the situation.perceptual_representation (
PerceptualRepresentation[~PerceptionT]) – ThePerceptualRepresentationof the situation received by theTopLevelLanguageLearner.predicted_scene_description (
TopLevelLanguageLearnerDescribeReturn) –TopLevelLanguageLearnerDescribeReturn
- Return type
- class adam.experiment.observer.HTMLLoggerPostObserver(name, *, html_logger, candidate_accuracy_observer, precision_recall_observer, test_mode, counter=0)¶
Logs the true description and learner’s descriptions throughout the learning process.
- html_logger: adam.experiment.observer.LearningProgressHtmlLogger¶
- candidate_accuracy_observer¶
- precision_recall_observer¶
- observe(situation, true_description, perceptual_representation, predicted_scene_description)¶
Observe a description provided by a
TopLevelLanguageLearner.- Parameters
situation (
Optional[~SituationT]) – TheSituationbeing described. This is optional.true_description (
LinguisticDescription) – The “gold-standard” description of the situation.perceptual_representation (
PerceptualRepresentation[~PerceptionT]) – ThePerceptualRepresentationof the situation received by theTopLevelLanguageLearner.predicted_scene_description (
TopLevelLanguageLearnerDescribeReturn) –TopLevelLanguageLearnerDescribeReturn
- Return type
- class adam.experiment.observer.YAMLLogger(name, experiment_path, file_name=None, *, counter=0, copy_curriculum=True)¶
-
- experiment_path: pathlib.Path¶
- static from_params(name, params)¶
- observe(situation, true_description, perceptual_representation, predicted_scene_description)¶
Observe a description provided by a
TopLevelLanguageLearner.- Parameters
situation (
Optional[~SituationT]) – TheSituationbeing described. This is optional.true_description (
LinguisticDescription) – The “gold-standard” description of the situation.perceptual_representation (
PerceptualRepresentation[~PerceptionT]) – ThePerceptualRepresentationof the situation received by theTopLevelLanguageLearner.predicted_scene_description (
TopLevelLanguageLearnerDescribeReturn) –TopLevelLanguageLearnerDescribeReturn
- Return type
Other Code¶
adam.ui¶
Interfaces for supporting user interfaces, such as for the DARPA demos.
- class adam.ui.UserInterface¶
Interface to represent user interfaces for demonstrations.
This is just a placeholder for now.
adam.math_3d¶
Contains math utilities for working in three-dimensional space.
We are not going to work with very large 3D models, so this is no optimized for speed.
adam.random_utils¶
Utilities for working with random numbers.
This currently contains only an abstraction over random.choice which makes it easier to test
things which make random choices.
- class adam.random_utils.SequenceChooser¶
Abstraction over a strategy for selecting items from a sequence.
- choice(elements)¶
Choose one element from elements using some undefined policy.
- Parameters
elements (
Sequence[~T]) – The sequence of elements to choose from. If this sequence is empty, anraised. (IndexError should be) –
- Return type
~T
- Returns
One of the elements of elements; no further requirement is defined.
- class adam.random_utils.FixedIndexChooser(index_to_choose)¶
A
SequenceChooserwhich always chooses the element at the given index.If the fixed index exceeds the length of the supplied (non-empty) sequence, then the element at the fixed index modulo the sequence length is returned.
- choice(elements)¶
Choose one element from elements using some undefined policy.
- Parameters
elements (
Sequence[~T]) – The sequence of elements to choose from. If this sequence is empty, anraised. (IndexError should be) –
- Return type
~T
- Returns
One of the elements of elements; no further requirement is defined.
- class adam.random_utils.RandomChooser(random)¶
- A
SequenceChooserwhich delegates the choice to a contained standard library random number generator.
- choice(elements)¶
Choose one element from elements using some undefined policy.
- Parameters
elements (
Sequence[~T]) – The sequence of elements to choose from. If this sequence is empty, anraised. (IndexError should be) –
- Return type
~T
- Returns
One of the elements of elements; no further requirement is defined.
- static for_seed(seed=0)¶
Get a
RandomChooserfrom a random number generator initialized with the specified seed.- Return type
- A
- class adam.random_utils.RotatingIndexChooser¶
A
SequenceChooserwhich increments the index it chooses after each choice.If the current index exceeds the length of the supplied (non-empty) sequence, then the element at the current index modulo the sequence length is returned.
- choice(elements)¶
Choose one element from elements using some undefined policy.
- Parameters
elements (
Sequence[~T]) – The sequence of elements to choose from. If this sequence is empty, anraised. (IndexError should be) –
- Return type
~T
- Returns
One of the elements of elements; no further requirement is defined.
GAILA-Specific¶
adam.ontology.phase1_ontology¶
The Ontology for use in ISI’s GAILA Phase 1 effort.
Note that this Ontology is only used for training and testing example generation; the learner
has no access to it.
The following will eventually end up here:
Objects: mommy, daddy, baby, book, house, car, water, ball, juice, cup, box, chair, head, milk, hand, dog, truck, door, hat, table, cookie, bird
Actions/Verbs: go, put, come, take, eat, give, turn, sit, drink, push, fall, throw, move, jump, has (possessive), give, roll, fly
Relations, Modifiers, Function Words: basic color terms (red, blue, green, white, black…), one, two, I, me, my, you, your, to, in, on, [beside, behind, in front of, over, under], up, down
- adam.ontology.phase1_ontology.HOLLOW = hollow[binary]¶
Whether an object should be though of as empty on the inside. In particular, hollow objects may serve as containers.
Jackendoff and Landau argue this should be regarded as a primitive of object perception.
- adam.ontology.phase1_ontology.RECOGNIZED_PARTICULAR_PROPERTY = recognized-particular[binary]¶
Indicates that a property in the ontology indicates the identity of an object as a known particular object (rather than a class) which is assumed to be known to the
TopLevelLanguageLearner. The prototypical cases here are Mom and Dad.
- adam.ontology.phase1_ontology.GAZED_AT = gazed-at[binary]¶
Indicates the object of the focus of the speaker. This is not currently strictly enforced and is implicity generated in the perception step if not explicit in a situation.
- adam.ontology.phase1_ontology.LEARNER = learner[is-learner]¶
We represent the language learner itself in the situation, because the size or position of objects relative to the learner itself may be significant for learning.
- adam.ontology.phase1_ontology.near_region(reference_object, *, direction=None)¶
- Return type
Region[~_ObjectT]
- adam.ontology.phase1_ontology.far_region(reference_object, *, direction=None)¶
- Return type
Region[~_ObjectT]
- adam.ontology.phase1_ontology.PART_OF = partOf¶
A relation indicating that one object is part of another object.
- adam.ontology.phase1_ontology.SAME_TYPE = same-type¶
A relation indicating that one object is bigger than another object.
This is a placeholder for a more sophisticated representation of size: https://github.com/isi-vista/adam/issues/70
- adam.ontology.phase1_ontology.SMALLER_THAN_SAME_TYPE = smallerThanSameType¶
A relation indicating that one object is smaller than another object.
This is a placeholder for a more sophisticated representation of size: https://github.com/isi-vista/adam/issues/70
- adam.ontology.phase1_ontology.MUCH_BIGGER_THAN = muchBiggerThan¶
A relation indicating one axis of a geon is much bigger than another. This should only be used for geon axis, relations, not general object relations.
- adam.ontology.phase1_ontology.MUCH_SMALLER_THAN = muchSmallerThan¶
A relation indicating one axis of a geon is much smaller than another. This should only be used for geon axis, relations, not general object relations.
- adam.ontology.phase1_ontology.ABOUT_THE_SAME_SIZE_AS_LEARNER = aboutSameSizeAsLearner¶
This is for use only when generating perceptions, where we special-case size relations to the learner to also be represented as properties, which makes object learner simpler
- adam.ontology.phase1_ontology.spin_around_primary_axis(object_)¶
adam.language_specific.english.english_phase_1_lexicon¶
adam.curriculum.phase1_curriculum¶
Curricula for DARPA GAILA Phase 1
- adam.curriculum.phase1_curriculum.falling_template(theme, *, lands_on_ground, syntax_hints, spatial_properties=i{}, background)¶
- Return type
- adam.curriculum.phase1_curriculum.fall_on_ground_template(theme, *, spatial_properties=i{}, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.make_fall_templates(background)¶
- Return type
- adam.curriculum.phase1_curriculum.make_give_templates(background)¶
- Return type
- adam.curriculum.phase1_curriculum.bare_fly(agent, *, up, syntax_hints, spatial_properties=i{}, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.make_fly_templates(background, banned_ontology_types=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.intransitive_roll(agent, surface, *, spatial_properties=i{}, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.transitive_roll(agent, theme, surface, *, spatial_properties=i{}, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.transitive_roll_with_surface(agent, theme, surface, *, spatial_properties=i{}, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.make_roll_templates(noise_objects)¶
- Return type
- adam.curriculum.phase1_curriculum.make_transitive_roll_templates(noise_objects)¶
- Return type
- adam.curriculum.phase1_curriculum.make_jump_template(agent, *, use_adverbial_path_modifier, spatial_properties=i{}, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.make_pass_template(agent, theme, goal, *, use_adverbial_path_modifier, operator=None, spatial_properties=i{}, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.make_jump_templates(noise_objects)¶
- adam.curriculum.phase1_curriculum.make_put_templates(noise_objects)¶
- Return type
- adam.curriculum.phase1_curriculum.make_drink_template(agent, liquid, container, noise_objects)¶
- Return type
- adam.curriculum.phase1_curriculum.make_drink_from_template(agent, liquid, container, noise_objects)¶
- Return type
- adam.curriculum.phase1_curriculum.make_eat_template(agent, patient, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.make_sit_template_intransitive(agent, sit_surface, noise_objects, *, syntax_hints, surface)¶
- Return type
- adam.curriculum.phase1_curriculum.make_sit_transitive(agent, sit_surface, noise_objects, *, syntax_hints, surface)¶
- Return type
- adam.curriculum.phase1_curriculum.make_sit_templates(noise_objects, banned_ontology_types=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.make_take_template(agent, theme, *, use_adverbial_path_modifier, spatial_properties=None, operator=None, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.make_walk_run_template(agent, *, use_adverbial_path_modifier, operator=None, spatial_properties=None, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.bare_move_template(agent, goal_reference, *, spatial_properties=i{}, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.transitive_move_template(agent, theme, goal_reference, *, spatial_properties=i{}, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.make_move_templates(noise_objects)¶
- Return type
- adam.curriculum.phase1_curriculum.make_spin_templates(noise_objects)¶
- Return type
- adam.curriculum.phase1_curriculum.make_go_templates(noise_objects)¶
- Return type
- adam.curriculum.phase1_curriculum.make_push_templates(agent, theme, push_surface, push_goal, *, operator=None, use_adverbial_path_modifier, spatial_properties=i{}, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.throw_on_ground_template(agent, theme, *, spatial_properties=i{}, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.throw_template(agent, theme, goal, *, spatial_properties=i{}, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.throw_up_down_template(agent, theme, goal, *, is_up, spatial_properties=i{}, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.throw_to_template(agent, theme, goal, *, spatial_properties=None, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.throw_to_region_template(agent, theme, goal, *, spatial_properties=None, background=i{})¶
- Return type
- adam.curriculum.phase1_curriculum.make_throw_animacy_templates(noise_objects)¶
- Return type
- adam.curriculum.phase1_curriculum.make_throw_templates(noise_objects)¶
- Return type
- adam.curriculum.phase1_curriculum.build_gaila_phase1_object_curriculum(num_samples, num_noise_objects, language_generator)¶
One particular instantiation of the object-learning parts of the curriculum for GAILA Phase 1.
- adam.curriculum.phase1_curriculum.build_gaila_plurals_curriculum(num_samples, num_noise_objects, language_generator)¶
- adam.curriculum.phase1_curriculum.build_gaila_generics_curriculum(num_samples, num_noise_objects, language_generator)¶
- adam.curriculum.phase1_curriculum.build_gaila_phase1_attribute_curriculum(num_samples, num_noise_objects, language_generator)¶
One particular instantiation of the object-learning parts of the curriculum for GAILA Phase 1.
- adam.curriculum.phase1_curriculum.build_classifier_curriculum(num_samples, num_noise_objects, language_generator)¶
One particular instantiation of the Chinese classifier learning curriculum
- adam.curriculum.phase1_curriculum.build_gaila_phase1_relation_curriculum(num_samples, num_noise_objects, language_generator)¶
One particular instantiation of the object-learning parts of the curriculum for GAILA Phase 1.
- adam.curriculum.phase1_curriculum.build_gaila_phase1_verb_curriculum(num_samples, num_noise_objects, language_generator)¶
One particular instantiation of the object-learning parts of the curriculum for GAILA Phase 1.
- adam.curriculum.phase1_curriculum.build_gaila_phase_1_curriculum(num_samples, num_noise_objects, language_generator)¶
One particular instantiation of the curriculum for GAILA Phase 1.
Language-Specific¶
adam.language_specific¶
Define language independent properties at the module level
adam.language_specific.english¶
- adam.language_specific.english.DETERMINERS = i{'the', 'a', 'yi1_ge4', 'yi1_jang1', 'yi1_ben3', 'yi1_jyan1', 'yi1_lyang4', 'yi1_bei1', 'yi1_ba3', 'yi1_jr1', 'yi1_shan4', 'yi1_ding3', 'yi1_kwai4', 'yi1_tiao2', 'yi1_zhi1'}¶
These are determiners we automatically add to the beginning of non-proper English noun phrases. This is a language-specific hack since learning determiners is out of our scope: https://github.com/isi-vista/adam/issues/498
- adam.language_specific.english.ENGLISH_BLOCK_DETERMINERS = i{'you', 'me', 'your', 'my', 'the', 'a'}¶
These words block the addition of the determiners above to English noun phrases.
adam.language_specific.english.english_language_generator¶
- class adam.language_specific.english.english_language_generator.SimpleRuleBasedEnglishLanguageGenerator(*, ontology_lexicon)¶
A simple rule-based approach for translating
HighLevelSemanticsSituations to English dependency trees.We currently only generate a single possible
LinearizedDependencyTreefor a given situation.- generate_language(situation, chooser)¶
Generate a collection of human language descriptions of the given
Situation. :type situation:HighLevelSemanticsSituation:param situation: theSituationto describe. :type chooser:SequenceChooser:param chooser: theSequenceChooserto use if any random decisions are required.- Return type
ImmutableSet[LinearizedDependencyTree]- Returns
A
LinguisticDescriptionof that situation.